
M2P2 Dataset and Open-Source Build are available on

M2P2 is a Multi-Modal Passive Perception dataset designed for off-road mobility in extreme low-light conditions. This repository contains the code and resources related to the M2P2 dataset, which enables off-road mobility using passive perception in low-light to no-light conditions.
- Total Compressed Size: 1138.63 GB
- Total Distance: >32 km
- Total Time: ~10.15 hours
- Environments: Paved trails, non-paved off-road paths, and unprepared off-trail areas
- Lighting Conditions: 20 lx to complete darkness (0 lx)
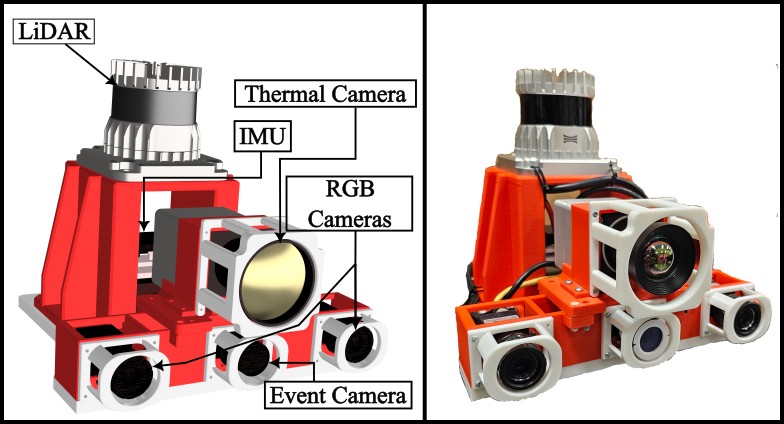
The M2P2 dataset was collected using a multi-modal sensor suite mounted on a Clearpath Husky A200 robot, including:
- Xenics Ceres V 1280 thermal camera @ 1280x1024, 10 Hz
- Prophesee Metavision EVK4 event camera @ 1280x720
- Two FLIR Blackfly S RGB cameras @ 1616x1240, 10 Hz
- Yahboom 10-DoF IMU @ 200 Hz
- 3D Ouster OS1-128 LiDAR @ 1024x10, 10 Hz (with embedded IMU @ 125 Hz) for ground truth
The dataset consists of the following runs, with each of the runs consisting of several 45s, 60s or 90s chunks due to file size constraints on GMU Dataverse
- Burke Lake (60s chunks)
- Lake Braddock (90s chunks)
- Lake Royal (90s chunks)
- GMU Main Campus (45s chunks)
- GMU West Campus - day 1 (90s chunks)
- GMU West Campus - day 2 (60s chunks)
- GMU West Campus - day 3 (90s chunks)
| Dataverse Directory | Number of Files | Total Size (GB) | Chunk Size (seconds) |
|---|---|---|---|
| m2p2_rosbags/burke_lake | 136 | 297.49 | 60 |
| m2p2_rosbags/lake_braddock | 59 | 134.08 | 90 |
| m2p2_rosbags/lake_royal | 103 | 223.91 | 90 |
| m2p2_rosbags/main_campus | 56 | 139.87 | 45 |
| m2p2_rosbags/west_campus_1 | 28 | 66.78 | 90 |
| m2p2_rosbags/west_campus_2 | 72 | 137.77 | 60 |
| m2p2_rosbags/west_campus_3 | 60 | 138.73 | 90 |
Each rosbag chunk contains the following topics on a best effort basis:
/sensor_suite/left_camera_optical/image_color/compressed : sensor_msgs/CompressedImage/sensor_suite/left_camera_optical/camera_info : sensor_msgs/CameraInfo/sensor_suite/right_camera_optical/image_color/compressed : sensor_msgs/CompressedImage/sensor_suite/right_camera_optical/camera_info : sensor_msgs/CameraInfo
/sensor_suite/lwir/lwir/image_raw/compressed : sensor_msgs/CompressedImage/sensor_suite/lwir/lwir/camera_info : sensor_msgs/CameraInfo
/sensor_suite/event_camera/events : event_camera_msgs/EventPacket/sensor_suite/event_camera/camera_info : sensor_msgs/CameraInfo
/sensor_suite/ouster/points : sensor_msgs/PointCloud2
/sensor_suite/ouster/imu : sensor_msgs/Imu
/sensor_suite/f9p_rover/fix : sensor_msgs/NavSatFix/sensor_suite/f9p_rover/fix_velocity : geometry_msgs/TwistWithCovarianceStamped/sensor_suite/f9p_rover/navposecef : ublox_msgs/NavPOSECEF/sensor_suite/f9p_rover/navpvt : ublox_msgs/NavPVT/sensor_suite/f9p_rover/navsat : ublox_msgs/NavSAT/sensor_suite/f9p_rover/navstatus : ublox_msgs/NavSTATUS
/sensor_suite/witmotion_imu/imu : sensor_msgs/Imu/sensor_suite/witmotion_imu/magnetometer : sensor_msgs/MagneticField/sensor_suite/witmotion_imu/temperature : sensor_msgs/Temperature
/husky_velocity_controller/odom : nav_msgs/Odometry/odometry/filtered : nav_msgs/Odometry
/husky_velocity_controller/cmd_vel : geometry_msgs/Twist/husky_velocity_controller/cmd_vel_out : geometry_msgs/TwistStamped/joy_teleop/cmd_vel : geometry_msgs/Twist/joy_teleop/joy : sensor_msgs/Joy
/status : husky_msgs/HuskyStatus
/tf : tf2_msgs/TFMessage/tf_static : tf2_msgs/TFMessage
This project is licensed under the MIT License.