{kind=link}
{kind=link}
{kind=link}

-
This project, We apply deep learning to underwater images dataset for classify class of each pixel of an image that called "Semantic Segmentaion".
-
The dataset consist of the underwater image (3 Channels) from Chulabhorn Walailak Swimming Pool at Kasetsart University and Robosub competition at San Diego, CA, USA.
-
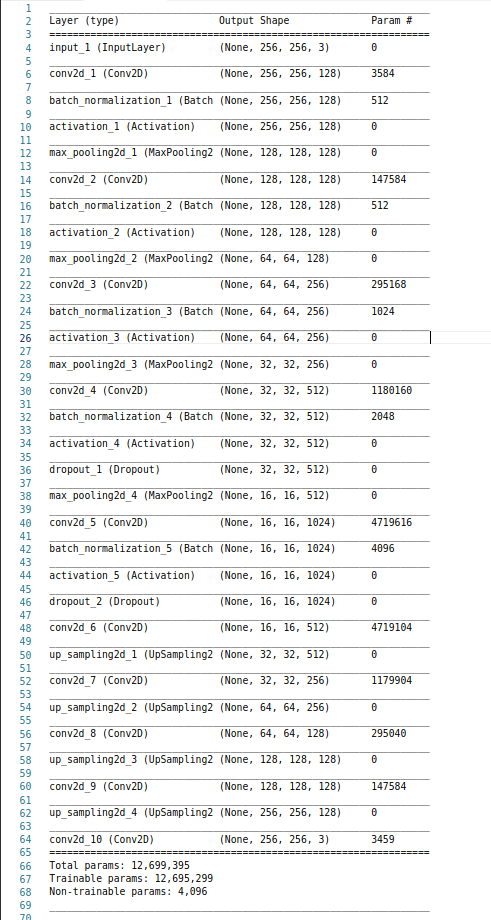
Ours model based on conventional autoencoder that have 2 important part.
-
First, the encoder part, we apply Conv2D > BatchNorm > ReLU > Maxpooling (downsampling) and apply Dropout in 2 last layer of encoder part.
-
Second, the decoder part, we apply Conv2d > UpSampling to every layer in decoder part.
-
-
Finally, we run model on Jetson TX2 with ROS Framework and publish the result to node that have 6.5 frame per second. If you want to see the summary of model click here.
{kind=link}
Hardware
Software
Libraries
Files
Website
- uEye Industrial Cameras UI-3260CP Rev.2
- Kowa C-Mount 6mm
- Jetson TX2
- Robot Operating System ROS
- Tensorflow
- Keras
- OpenCV
- Numpy
- Matplot
- Scikit Learn
-
model.py - create structure of model.
-
mycallback.py - create callback for handle the model saving and save image while training.
-
train.py - read image file and divide the training and validation set.
-
model_predict_obj.py - create model and trianing.
-
data_preprocessing.py - convert img to csv file and read csv file for training.
-
robin-gpu - This website use for sampling images from video file and label the groundTruth images.
neural network A Comprehensive Introduction to Different Types of Convolutions in Deep Learning BatchNormalize
- email: [email protected]