ROS 2 packages to implement generic controllers based on Hierarchical Optimization (HO) and Model Predictive Control (MPC).
These packages have been tested with ROS 2 Humble and ROS 2 Iron on an Ubuntu system.
To use Torch with an NVIDIA graphics card, it is necessary to install the NVIDIA drivers for Ubuntu. Here.
Ubuntu packages:
git
Python 3 packages:
casadiclarabelcvxpymatplotlibnumpyosqppandasproxsuitequadprogqpsolversscipyreluqptorchtorchaudiotorchvision
Torch, torchaudio, and torchvision are necessary for the neural network approximator and ReLuQP.
ffmepg is required for saving the videos in .mp4 format.
When I write <some_text>, you have to change the value in the <>.
Create a GitHub SSH key. Just do it.
Create a workspace and clone the repo in the source directory (don't fucking call your workspace a generic <my_workspace>)
mkdir <my_workspace>
cd <my_workspace>
git clone --recursive [email protected]:ddebenedittis/hierarchical_optimization_mpc.git src/hierarchical_optimization_mpcBuild the workspace with
colcon build --symlink-installSource the workspace with (you have to add it to the ~/.bashrc or do it on every newly opened terminal)
source install/setup.baseSingle robot example
ros2 run hierarchical_optimization_mpc example_single_robotMulti robot example
ros2 run hierarchical_optimization_mpc example_multi_robot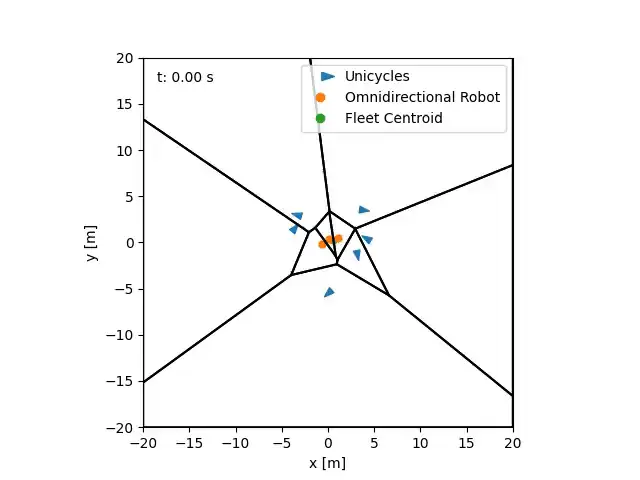
Toy problem 1 (multiple conflicting tasks to one robot)
ros2 run hierarchical_optimization_mpc toy_problem_1Python is more verbose than ROS, but you can pass options
Multi robot exmaple
python3 src/hierarchical_optimization_mpc/hierarchical_optimization_mpc/example_multi_robot.py [--hierarchical {True, False}] [--n_robots [int,int]] [--solver {clarabel, osqp, proxqp, quadprog, reluqp}] [--visual_method {plot, save, none}]Parameters:
--hierarchical bool: if True, uses the hierarchical approach.--n_robots list[int]: Number of unicycles and omnidirectional robots (default[6,0]).--solver {clarabel, osqp, proxqp, quadprog, reluqp}: QP solver to use.--visual_method {plot, save, none}: how to display the results.
No known bugs.
{kind=link}