- Thiemo Wiedemeyer <[email protected]>, Institute for Artificial Intelligence, University of Bremen
This is a collection of tools and libraries for a ROS Interface to the Kinect One (Kinect v2).
It contains:
- a calibration tool for calibrating the IR sensor of the Kinect One to the RGB sensor
- a library for depth registration with OpenCL support
- the bridge between libfreenect2 and ROS
- a viewer for the images / point clouds
- ROS Hydro/Indigo
- OpenCV
- PCL
- Eigen (optional)
- OpenCL (optional)
- libfreenect2 (either directly from this fork or with the changes of this pull-request and this pull-request.)
- Install the dependencies. Note that a modified version of libfreenect2 is needed
- Clone this repository into your catkin workspace.
- Build it.
- Connect your sensor and run
kinect2_bridge. - Calibrate your sensor using the
kinect2_calibration. Further details - Add the calibration files to the
kinect2_bridge/data/<serialnumber>folder. Further details - Restart
kinect2_bridgeand view the results usingrosrun registration_viewer viewer -kinect2 -cloud.
To gain access to the Kinect One for non root users you have to add a rule to the udev rules.
- Create a file named
90-kinect2.rulesin/etc/udev/rules.d/. - Write the following lines into that file:
# ATTR{product}=="Kinect2"
SUBSYSTEM=="usb", ATTR{idVendor}=="045e", ATTR{idProduct}=="02c4", MODE="0666"
SUBSYSTEM=="usb", ATTR{idVendor}=="045e", ATTR{idProduct}=="02d8", MODE="0666"
SUBSYSTEM=="usb", ATTR{idVendor}=="045e", ATTR{idProduct}=="02d9", MODE="0666"
- Check if the
idProductof your sensor is in the list. If not just add another line with theidProductof your sensor. You can obtain it by runningdmesg | grep "045e". - Reconnect the sensor and you should be able to access it.
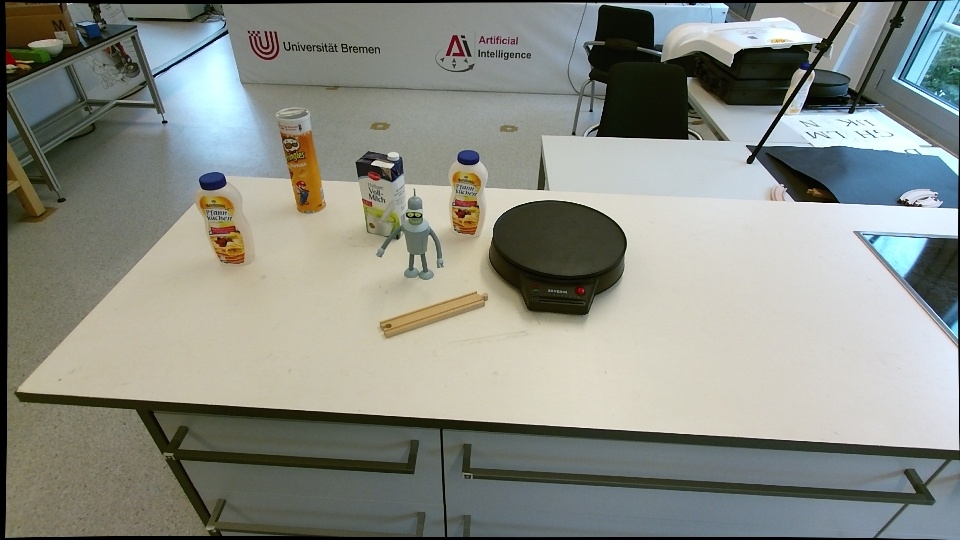
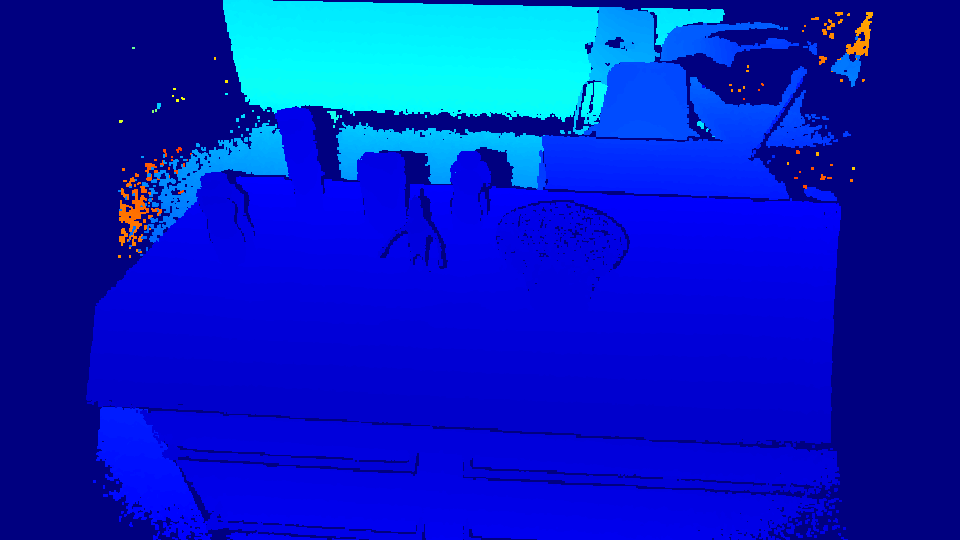
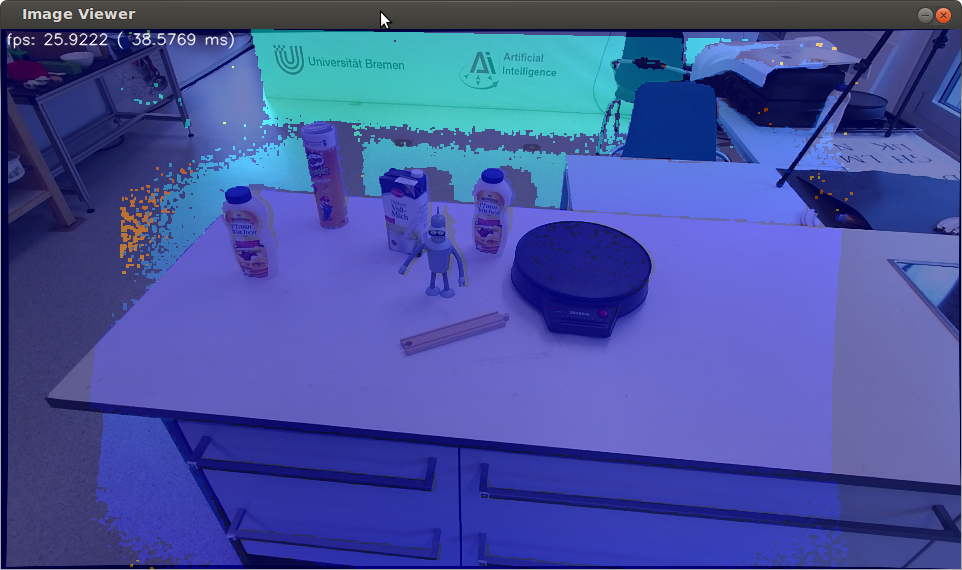
Here are some screenshots from our toolkit: