 -## Results and models
+## Results and Models
-### Kinetics-400
+1. Models with * in `Inference results` are ported from the repo [SlowFast](https://github.com/facebookresearch/SlowFast/) and tested on our data, and models in `Training results` are trained in MMAction2 on our data.
+2. The values in columns named after `reference` are copied from paper, and `reference*` are results using [SlowFast](https://github.com/facebookresearch/SlowFast/) repo and trained on our data.
+3. The validation set of Kinetics400 we used consists of 19796 videos. These videos are available at [Kinetics400-Validation](https://mycuhk-my.sharepoint.com/:u:/g/personal/1155136485_link_cuhk_edu_hk/EbXw2WX94J1Hunyt3MWNDJUBz-nHvQYhO9pvKqm6g39PMA?e=a9QldB). The corresponding [data list](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_val_list.txt) (each line is of the format 'video_id, num_frames, label_index') and the [label map](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_class2ind.txt) are also available.
+4. MaskFeat fine-tuning experiment is based on pretrain model from [MMSelfSup](https://github.com/open-mmlab/mmselfsup/tree/dev-1.x/projects/maskfeat_video), and the corresponding reference result is based on pretrain model from [SlowFast](https://github.com/facebookresearch/SlowFast/).
+5. Due to the different versions of Kinetics-400, our training results are different from paper.
+6. Due to the training efficiency, we currently only provide MViT-small training results, we don't ensure other config files' training accuracy and welcome you to contribute your reproduction results.
+7. We use `repeat augment` in MViT training configs following [SlowFast](https://github.com/facebookresearch/SlowFast/). [Repeat augment](https://arxiv.org/pdf/1901.09335.pdf) takes multiple times of data augment for one video, this way can improve the generalization of the model and relieve the IO stress of loading videos. And please note that the actual batch size is `num_repeats` times of `batch_size` in `train_dataloader`.
-| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top1 acc | testing protocol | FLOPs | params | config | ckpt |
+### Inference results
+
+#### Kinetics-400
+
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top5 acc | testing protocol | FLOPs | params | config | ckpt |
| :---------------------: | :--------: | :--------: | :----------: | :------: | :------: | :------------------------------: | :------------------------------: | :--------------: | :---: | :----: | :------------------: | :----------------: |
-| 16x4x1 | 224x224 | MViTv2-S\* | From scratch | 81.1 | 94.7 | [81.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M | [config](/configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth) |
+| 16x4x1 | 224x224 | MViTv2-S\* | From scratch | 81.1 | 94.7 | [81.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M | [config](/configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth) |
| 32x3x1 | 224x224 | MViTv2-B\* | From scratch | 82.6 | 95.8 | [82.9](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [95.7](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 225G | 51.2M | [config](/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-base-p244_32x3x1_kinetics400-rgb_20221021-f392cd2d.pth) |
| 40x3x1 | 312x312 | MViTv2-L\* | From scratch | 85.4 | 96.2 | [86.1](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [97.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 3 crop | 2828G | 213M | [config](/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_40x3x1_kinetics400-rgb_20221021-11fe1f97.pth) |
-### Something-Something V2
+#### Something-Something V2
-| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top1 acc | testing protocol | FLOPs | params | config | ckpt |
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top5 acc | testing protocol | FLOPs | params | config | ckpt |
| :---------------------: | :--------: | :--------: | :----------: | :------: | :------: | :------------------------------: | :------------------------------: | :--------------: | :---: | :----: | :------------------: | :----------------: |
-| uniform 16 | 224x224 | MViTv2-S\* | K400 | 68.1 | 91.0 | [68.2](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [91.4](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 64G | 34.4M | [config](/configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_u16_sthv2-rgb_20221021-65ecae7d.pth) |
+| uniform 16 | 224x224 | MViTv2-S\* | K400 | 68.1 | 91.0 | [68.2](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [91.4](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 64G | 34.4M | [config](/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_u16_sthv2-rgb_20221021-65ecae7d.pth) |
| uniform 32 | 224x224 | MViTv2-B\* | K400 | 70.8 | 92.7 | [70.5](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [92.7](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 225G | 51.1M | [config](/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-base-p244_u32_sthv2-rgb_20221021-d5de5da6.pth) |
| uniform 40 | 312x312 | MViTv2-L\* | IN21K + K400 | 73.2 | 94.0 | [73.3](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 2828G | 213M | [config](/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_u40_sthv2-rgb_20221021-61696e07.pth) |
-*Models with * are ported from the repo [SlowFast](https://github.com/facebookresearch/SlowFast/) and tested on our data. Currently, we only support the testing of MViT models, training will be available soon.*
+### Training results
+
+#### Kinetics-400
+
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference\* top1 acc | reference\* top5 acc | testing protocol | FLOPs | params | config | ckpt | log |
+| :---------------------: | :--------: | :------: | :-----------: | :------: | :------: | :---------------------------: | :----------------------------: | :---------------: | :---: | :----: | :--------------: | :------------: | :-----------: |
+| 16x4x1 | 224x224 | MViTv2-S | From scratch | 80.6 | 94.7 | [80.8](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M | [config](configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb_20230201-23284ff3.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.log) |
+| 16x4x1 | 224x224 | MViTv2-S | K400 MaskFeat | 81.8 | 95.2 | [81.5](https://github.com/facebookresearch/SlowFast/blob/main/projects/maskfeat/README.md) | [94.9](https://github.com/facebookresearch/SlowFast/blob/main/projects/maskfeat/README.md) | 10 clips x 1 crop | 71G | 36.4M | [config](/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb_20230201-5bced1d0.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.log) |
+
+the corresponding result without repeat augment is as follows:
+
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference\* top1 acc | reference\* top5 acc | testing protocol | FLOPs | params |
+| :---------------------: | :--------: | :------: | :----------: | :------: | :------: | :--------------------------------------------------: | :--------------------------------------------------: | :--------------: | :---: | :----: |
+| 16x4x1 | 224x224 | MViTv2-S | From scratch | 79.4 | 93.9 | [80.8](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M |
+
+#### Something-Something V2
-1. The values in columns named after "reference" are copied from paper
-2. The validation set of Kinetics400 we used consists of 19796 videos. These videos are available at [Kinetics400-Validation](https://mycuhk-my.sharepoint.com/:u:/g/personal/1155136485_link_cuhk_edu_hk/EbXw2WX94J1Hunyt3MWNDJUBz-nHvQYhO9pvKqm6g39PMA?e=a9QldB). The corresponding [data list](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_val_list.txt) (each line is of the format 'video_id, num_frames, label_index') and the [label map](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_class2ind.txt) are also available.
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top5 acc | testing protocol | FLOPs | params | config | ckpt | log |
+| :---------------------: | :--------: | :------: | :------: | :------: | :------: | :---------------------------: | :----------------------------: | :--------------: | :---: | :----: | :----------------: | :--------------: | :-------------: |
+| uniform 16 | 224x224 | MViTv2-S | K400 | 68.2 | 91.3 | [68.2](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [91.4](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 64G | 34.4M | [config](/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb_20230201-4065c1b9.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.log) |
For more details on data preparation, you can refer to
diff --git a/configs/recognition/mvit/metafile.yml b/configs/recognition/mvit/metafile.yml
index 888fa24732..3170c61bdc 100644
--- a/configs/recognition/mvit/metafile.yml
+++ b/configs/recognition/mvit/metafile.yml
@@ -6,8 +6,8 @@ Collections:
Title: "MViTv2: Improved Multiscale Vision Transformers for Classification and Detection"
Models:
- - Name: mvit-small-p244_16x4x1_kinetics400-rgb
- Config: configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py
+ - Name: mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb_infer
+ Config: configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
In Collection: MViT
Metadata:
Architecture: MViT-small
@@ -24,6 +24,28 @@ Models:
Top 5 Accuracy: 94.7
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth
+ - Name: mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb
+ Config: configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
+ In Collection: MViT
+ Metadata:
+ Architecture: MViT-small
+ Batch Size: 16
+ Epochs: 100
+ FLOPs: 64G
+ Parameters: 34.5M
+ Resolution: 224x224
+ Training Data: Kinetics-400
+ Training Resources: 32 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 80.6
+ Top 5 Accuracy: 94.7
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb_20230201-23284ff3.pth
+
- Name: mvit-base-p244_32x3x1_kinetics400-rgb
Config: configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
In Collection: MViT
@@ -60,8 +82,8 @@ Models:
Top 5 Accuracy: 94.7
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_40x3x1_kinetics400-rgb_20221021-11fe1f97.pth
- - Name: mvit-small-p244_u16_sthv2-rgb
- Config: configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py
+ - Name: mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb_infer
+ Config: configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
In Collection: MViT
Metadata:
Architecture: MViT-small
@@ -78,6 +100,29 @@ Models:
Top 5 Accuracy: 91.0
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_u16_sthv2-rgb_20221021-65ecae7d.pth
+ - Name: mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb
+ Config: configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
+ In Collection: MViT
+ Metadata:
+ Architecture: MViT-small
+ Batch Size: 16
+ Epochs: 100
+ FLOPs: 64G
+ Parameters: 34.4M
+ Pretrained: Kinetics-400
+ Resolution: 224x224
+ Training Data: SthV2
+ Training Resources: 16 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: SthV2
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 68.2
+ Top 5 Accuracy: 91.3
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb_20230201-4065c1b9.pth
+
- Name: mvit-base-p244_u32_sthv2-rgb
Config: configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
In Collection: MViT
@@ -113,3 +158,26 @@ Models:
Top 1 Accuracy: 73.2
Top 5 Accuracy: 94.0
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_u40_sthv2-rgb_20221021-61696e07.pth
+
+ - Name: mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb
+ Config: configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py
+ In Collection: MViT
+ Metadata:
+ Architecture: MViT-small
+ Batch Size: 32
+ Epochs: 100
+ FLOPs: 71G
+ Parameters: 36.4M
+ Pretrained: Kinetics-400 MaskFeat
+ Resolution: 224x224
+ Training Data: Kinetics-400
+ Training Resources: 8 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 81.8
+ Top 5 Accuracy: 95.2
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb_20230201-5bced1d0.pth
diff --git a/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py b/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
index b1e186f195..fb552c9329 100644
--- a/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
+++ b/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
@@ -76,13 +76,17 @@
dict(type='PackActionInputs')
]
+repeat_sample = 2
train_dataloader = dict(
batch_size=8,
num_workers=8,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
dataset=dict(
- type=dataset_type,
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ sample_once=True,
ann_file=ann_file_train,
data_prefix=dict(video=data_root),
pipeline=train_pipeline))
@@ -113,19 +117,21 @@
test_evaluator = val_evaluator
train_cfg = dict(
- type='EpochBasedTrainLoop', max_epochs=30, val_begin=1, val_interval=3)
+ type='EpochBasedTrainLoop', max_epochs=200, val_begin=1, val_interval=1)
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
+base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
- type='AdamW', lr=1.6e-3, betas=(0.9, 0.999), weight_decay=0.05))
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0),
+ clip_grad=dict(max_norm=1, norm_type=2))
param_scheduler = [
dict(
type='LinearLR',
- start_factor=0.1,
+ start_factor=0.01,
by_epoch=True,
begin=0,
end=30,
@@ -133,9 +139,9 @@
dict(
type='CosineAnnealingLR',
T_max=200,
- eta_min=0,
+ eta_min=base_lr / 100,
by_epoch=True,
- begin=0,
+ begin=30,
end=200,
convert_to_iter_based=True)
]
@@ -147,4 +153,4 @@
# - `enable` means enable scaling LR automatically
# or not by default.
# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
-auto_scale_lr = dict(enable=False, base_batch_size=64)
+auto_scale_lr = dict(enable=False, base_batch_size=512 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py b/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
index c954b60b54..cdbf22dd1f 100644
--- a/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
+++ b/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
@@ -108,7 +108,6 @@
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05))
diff --git a/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py b/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py
index 8c93519914..f2d7ef1419 100644
--- a/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py
+++ b/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py
@@ -13,12 +13,6 @@
type='ActionDataPreprocessor',
mean=[114.75, 114.75, 114.75],
std=[57.375, 57.375, 57.375],
- blending=dict(
- type='RandomBatchAugment',
- augments=[
- dict(type='MixupBlending', alpha=0.8, num_classes=400),
- dict(type='CutmixBlending', alpha=1, num_classes=400)
- ]),
format_shape='NCTHW'),
cls_head=dict(in_channels=1152),
test_cfg=dict(max_testing_views=5))
@@ -78,13 +72,17 @@
dict(type='PackActionInputs')
]
+repeat_sample = 2
train_dataloader = dict(
batch_size=8,
num_workers=8,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
dataset=dict(
- type=dataset_type,
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ sample_once=True,
ann_file=ann_file_train,
data_prefix=dict(video=data_root),
pipeline=train_pipeline))
@@ -119,26 +117,21 @@
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
+base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
- type='AdamW', lr=1.6e-3, betas=(0.9, 0.999), weight_decay=0.05))
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=10e-8),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0),
+ clip_grad=dict(max_norm=1, norm_type=2))
param_scheduler = [
- dict(
- type='LinearLR',
- start_factor=0.1,
- by_epoch=True,
- begin=0,
- end=30,
- convert_to_iter_based=True),
dict(
type='CosineAnnealingLR',
- T_max=200,
+ T_max=30,
eta_min=0,
by_epoch=True,
begin=0,
- end=200,
+ end=30,
convert_to_iter_based=True)
]
@@ -149,4 +142,4 @@
# - `enable` means enable scaling LR automatically
# or not by default.
# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
-auto_scale_lr = dict(enable=True, base_batch_size=512)
+auto_scale_lr = dict(enable=True, base_batch_size=128 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py b/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py
index b3fde41a78..ea9d54c068 100644
--- a/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py
+++ b/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py
@@ -110,7 +110,6 @@
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05))
diff --git a/configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py b/configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
similarity index 91%
rename from configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py
rename to configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
index 4da89b5a4a..9f6b1cbd6d 100644
--- a/configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py
+++ b/configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
@@ -24,6 +24,7 @@
ann_file_test = 'data/kinetics400/kinetics400_val_list_videos.txt'
file_client_args = dict(io_backend='disk')
+
train_pipeline = [
dict(type='DecordInit', **file_client_args),
dict(type='SampleFrames', clip_len=16, frame_interval=4, num_clips=1),
@@ -70,13 +71,17 @@
dict(type='PackActionInputs')
]
+repeat_sample = 2
train_dataloader = dict(
batch_size=8,
num_workers=8,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
dataset=dict(
- type=dataset_type,
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ sample_once=True,
ann_file=ann_file_train,
data_prefix=dict(video=data_root),
pipeline=train_pipeline))
@@ -107,20 +112,21 @@
test_evaluator = val_evaluator
train_cfg = dict(
- type='EpochBasedTrainLoop', max_epochs=200, val_begin=1, val_interval=3)
+ type='EpochBasedTrainLoop', max_epochs=200, val_begin=1, val_interval=1)
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
- type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05))
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0),
+ clip_grad=dict(max_norm=1, norm_type=2))
param_scheduler = [
dict(
type='LinearLR',
- start_factor=0.1,
+ start_factor=0.01,
by_epoch=True,
begin=0,
end=30,
@@ -142,4 +148,4 @@
# - `enable` means enable scaling LR automatically
# or not by default.
# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
-auto_scale_lr = dict(enable=True, base_batch_size=512)
+auto_scale_lr = dict(enable=True, base_batch_size=512 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py b/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py
new file mode 100644
index 0000000000..6fa2a5e654
--- /dev/null
+++ b/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py
@@ -0,0 +1,158 @@
+_base_ = [
+ '../../_base_/models/mvit_small.py', '../../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ drop_path_rate=0.1,
+ dim_mul_in_attention=False,
+ pretrained= # noqa: E251
+ 'https://download.openmmlab.com/mmselfsup/1.x/maskfeat/maskfeat_mvit-small_16xb32-amp-coslr-300e_k400/maskfeat_mvit-small_16xb32-amp-coslr-300e_k400_20230131-87d60b6f.pth', # noqa
+ pretrained_type='maskfeat',
+ ),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ blending=dict(
+ type='RandomBatchAugment',
+ augments=[
+ dict(type='MixupBlending', alpha=0.8, num_classes=400),
+ dict(type='CutmixBlending', alpha=1, num_classes=400)
+ ]),
+ format_shape='NCTHW'),
+ cls_head=dict(dropout_ratio=0., init_scale=0.001))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root = 'data/kinetics400/videos_train'
+data_root_val = 'data/kinetics400/videos_val'
+ann_file_train = 'data/kinetics400/kinetics400_train_list_videos.txt'
+ann_file_val = 'data/kinetics400/kinetics400_val_list_videos.txt'
+ann_file_test = 'data/kinetics400/kinetics400_val_list_videos.txt'
+
+file_client_args = dict(io_backend='disk')
+train_pipeline = [
+ dict(type='DecordInit', **file_client_args),
+ dict(type='SampleFrames', clip_len=16, frame_interval=4, num_clips=1),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 256)),
+ dict(type='PytorchVideoWrapper', op='RandAugment', magnitude=7),
+ dict(type='RandomResizedCrop'),
+ dict(type='Resize', scale=(224, 224), keep_ratio=False),
+ dict(type='Flip', flip_ratio=0.5),
+ dict(type='RandomErasing', erase_prob=0.25, mode='rand'),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+val_pipeline = [
+ dict(type='DecordInit', **file_client_args),
+ dict(
+ type='SampleFrames',
+ clip_len=16,
+ frame_interval=4,
+ num_clips=1,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 256)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+test_pipeline = [
+ dict(type='DecordInit', **file_client_args),
+ dict(
+ type='SampleFrames',
+ clip_len=16,
+ frame_interval=4,
+ num_clips=10,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+repeat_sample = 2
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
+ dataset=dict(
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ ann_file=ann_file_train,
+ data_prefix=dict(video=data_root),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=8,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_val,
+ data_prefix=dict(video=data_root_val),
+ pipeline=val_pipeline,
+ test_mode=True))
+test_dataloader = dict(
+ batch_size=1,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True))
+
+val_evaluator = dict(type='AccMetric')
+test_evaluator = val_evaluator
+
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=100, val_begin=1, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+base_lr = 9.6e-3 # for batch size 512
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
+ constructor='LearningRateDecayOptimizerConstructor',
+ paramwise_cfg={
+ 'decay_rate': 0.75,
+ 'decay_type': 'layer_wise',
+ 'num_layers': 16
+ },
+ clip_grad=dict(max_norm=5, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1 / 600,
+ by_epoch=True,
+ begin=0,
+ end=20,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ T_max=80,
+ eta_min_ratio=1 / 600,
+ by_epoch=True,
+ begin=20,
+ end=100,
+ convert_to_iter_based=True)
+]
+
+default_hooks = dict(
+ checkpoint=dict(interval=3, max_keep_ckpts=20), logger=dict(interval=100))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
+auto_scale_lr = dict(enable=True, base_batch_size=512 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py b/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
similarity index 91%
rename from configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py
rename to configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
index 08934b9a5e..1b4135b52e 100644
--- a/configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py
+++ b/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
@@ -2,7 +2,14 @@
'../../_base_/models/mvit_small.py', '../../_base_/default_runtime.py'
]
-model = dict(cls_head=dict(num_classes=174))
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth', # noqa: E501
+ prefix='backbone.')),
+ cls_head=dict(num_classes=174))
# dataset settings
dataset_type = 'VideoDataset'
@@ -91,7 +98,6 @@
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0))
diff --git a/configs/recognition/omnisource/README.md b/configs/recognition/omnisource/README.md
new file mode 100644
index 0000000000..64acf52c35
--- /dev/null
+++ b/configs/recognition/omnisource/README.md
@@ -0,0 +1,79 @@
+# Omnisource
+
+
+
+
+
+## Abstract
+
+
+
+We propose to train a recognizer that can classify images and videos. The recognizer is jointly trained on image and video datasets. Compared with pre-training on the same image dataset, this method can significantly improve the video recognition performance.
+
+
+
+## Results and Models
+
+### Kinetics-400
+
+| frame sampling strategy | scheduler | resolution | gpus | backbone | joint-training | top1 acc | top5 acc | testing protocol | FLOPs | params | config | ckpt | log |
+| :---------------------: | :-----------: | :--------: | :--: | :------: | :------------: | :------: | :------: | :---------------: | :----: | :----: | :---------------------------: | :-------------------------: | :-------------------------: |
+| 8x8x1 | Linear+Cosine | 224x224 | 8 | ResNet50 | ImageNet | 77.30 | 93.23 | 10 clips x 3 crop | 54.75G | 32.45M | [config](/configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb_20230208-61c4be0d.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.log) |
+
+1. The **gpus** indicates the number of gpus we used to get the checkpoint. If you want to use a different number of gpus or videos per gpu, the best way is to set `--auto-scale-lr` when calling `tools/train.py`, this parameter will auto-scale the learning rate according to the actual batch size and the original batch size.
+2. The validation set of Kinetics400 we used consists of 19796 videos. These videos are available at [Kinetics400-Validation](https://mycuhk-my.sharepoint.com/:u:/g/personal/1155136485_link_cuhk_edu_hk/EbXw2WX94J1Hunyt3MWNDJUBz-nHvQYhO9pvKqm6g39PMA?e=a9QldB). The corresponding [data list](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_val_list.txt) (each line is of the format 'video_id, num_frames, label_index') and the [label map](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_class2ind.txt) are also available.
+
+For more details on data preparation, you can refer to [Kinetics400](/tools/data/kinetics/README.md).
+
+## Train
+
+You can use the following command to train a model.
+
+```shell
+python tools/train.py ${CONFIG_FILE} [optional arguments]
+```
+
+Example: train SlowOnly model on Kinetics-400 dataset in a deterministic option with periodic validation.
+
+```shell
+python tools/train.py configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py \
+ --seed=0 --deterministic
+```
+
+We found that the training of this Omnisource model could crash for unknown reasons. If this happens, you can resume training by adding the `--cfg-options resume=True` to the training script.
+
+For more details, you can refer to the **Training** part in the [Training and Test Tutorial](/docs/en/user_guides/4_train_test.md).
+
+## Test
+
+You can use the following command to test a model.
+
+```shell
+python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [optional arguments]
+```
+
+Example: test SlowOnly model on Kinetics-400 dataset and dump the result to a pkl file.
+
+```shell
+python tools/test.py configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py \
+ checkpoints/SOME_CHECKPOINT.pth --dump result.pkl
+```
+
+For more details, you can refer to the **Test** part in the [Training and Test Tutorial](/docs/en/user_guides/4_train_test.md).
+
+## Citation
+
+```BibTeX
+@inproceedings{feichtenhofer2019slowfast,
+ title={Slowfast networks for video recognition},
+ author={Feichtenhofer, Christoph and Fan, Haoqi and Malik, Jitendra and He, Kaiming},
+ booktitle={Proceedings of the IEEE international conference on computer vision},
+ pages={6202--6211},
+ year={2019}
+}
+```
diff --git a/configs/recognition/omnisource/metafile.yml b/configs/recognition/omnisource/metafile.yml
new file mode 100644
index 0000000000..af4524e5b0
--- /dev/null
+++ b/configs/recognition/omnisource/metafile.yml
@@ -0,0 +1,28 @@
+Collections:
+ - Name: Omnisource
+ README: configs/recognition/omnisource/README.md
+
+
+Models:
+ - Name: slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb
+ Config: configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
+ In Collection: SlowOnly
+ Metadata:
+ Architecture: ResNet50
+ Batch Size: 16
+ Epochs: 256
+ FLOPs: 54.75G
+ Parameters: 32.45M
+ Pretrained: None
+ Resolution: short-side 320
+ Training Data: Kinetics-400
+ Training Resources: 8 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 77.30
+ Top 5 Accuracy: 93.23
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb_20230208-61c4be0d.pth
diff --git a/configs/recognition/omnisource/slowonly_r50_16xb16-8x8x1-256e_imagenet-kinetics400-rgb.py b/configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
similarity index 98%
rename from configs/recognition/omnisource/slowonly_r50_16xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
rename to configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
index 05feb2710a..2b28285635 100644
--- a/configs/recognition/omnisource/slowonly_r50_16xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
+++ b/configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
@@ -159,7 +159,7 @@
convert_to_iter_based=True)
]
"""
-The learning rate is for total_batch_size = 16 x 16 (num_gpus x batch_size)
+The learning rate is for total_batch_size = 8 x 16 (num_gpus x batch_size)
If you want to use other batch size or number of GPU settings, please update
the learning rate with the linear scaling rule.
"""
diff --git a/configs/recognition/slowfast/metafile.yml b/configs/recognition/slowfast/metafile.yml
index 94423659d1..7ba12c0e63 100644
--- a/configs/recognition/slowfast/metafile.yml
+++ b/configs/recognition/slowfast/metafile.yml
@@ -30,6 +30,8 @@ Models:
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/slowfast/slowfast_r50_8xb8-4x16x1-256e_kinetics400-rgb/slowfast_r50_8xb8-4x16x1-256e_kinetics400-rgb_20220901-701b0f6f.pth
- Name: slowfast_r50_8xb8-8x8x1-256e_kinetics400-rgb
+ Alias:
+ - slowfast
Config: configs/recognition/slowfast/slowfast_r50_8xb8-8x8x1-256e_kinetics400-rgb.py
In Collection: SlowFast
Metadata:
diff --git a/configs/recognition/tsn/metafile.yml b/configs/recognition/tsn/metafile.yml
index b4734c93a2..e618ed71cc 100644
--- a/configs/recognition/tsn/metafile.yml
+++ b/configs/recognition/tsn/metafile.yml
@@ -53,6 +53,8 @@ Models:
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/tsn/tsn_imagenet-pretrained-r50_8xb32-1x1x5-100e_kinetics400-rgb/tsn_imagenet-pretrained-r50_8xb32-1x1x5-100e_kinetics400-rgb_20220906-65d68713.pth
- Name: tsn_imagenet-pretrained-r50_8xb32-1x1x8-100e_kinetics400-rgb
+ Alias:
+ - TSN
Config: configs/recognition/tsn/tsn_imagenet-pretrained-r50_8xb32-1x1x8-100e_kinetics400-rgb.py
In Collection: TSN
Metadata:
diff --git a/configs/recognition/uniformer/README.md b/configs/recognition/uniformer/README.md
new file mode 100644
index 0000000000..65c224ecc3
--- /dev/null
+++ b/configs/recognition/uniformer/README.md
@@ -0,0 +1,67 @@
+# UniFormer
+
+[UniFormer: Unified Transformer for Efficient Spatiotemporal Representation Learning](https://arxiv.org/abs/2201.04676)
+
+
+
+## Abstract
+
+
+
+It is a challenging task to learn rich and multi-scale spatiotemporal semantics from high-dimensional videos, due to large local redundancy and complex global dependency between video frames. The recent advances in this research have been mainly driven by 3D convolutional neural networks and vision transformers. Although 3D convolution can efficiently aggregate local context to suppress local redundancy from a small 3D neighborhood, it lacks the capability to capture global dependency because of the limited receptive field. Alternatively, vision transformers can effectively capture long-range dependency by self-attention mechanism, while having the limitation on reducing local redundancy with blind similarity comparison among all the tokens in each layer. Based on these observations, we propose a novel Unified transFormer (UniFormer) which seamlessly integrates merits of 3D convolution and spatiotemporal self-attention in a concise transformer format, and achieves a preferable balance between computation and accuracy. Different from traditional transformers, our relation aggregator can tackle both spatiotemporal redundancy and dependency, by learning local and global token affinity respectively in shallow and deep layers. We conduct extensive experiments on the popular video benchmarks, e.g., Kinetics-400, Kinetics-600, and Something-Something V1&V2. With only ImageNet-1K pretraining, our UniFormer achieves 82.9%/84.8% top-1 accuracy on Kinetics-400/Kinetics-600, while requiring 10x fewer GFLOPs than other state-of-the-art methods. For Something-Something V1 and V2, our UniFormer achieves new state-of-the-art performances of 60.9% and 71.2% top-1 accuracy respectively.
+
+
+
+
-## Results and models
+## Results and Models
-### Kinetics-400
+1. Models with * in `Inference results` are ported from the repo [SlowFast](https://github.com/facebookresearch/SlowFast/) and tested on our data, and models in `Training results` are trained in MMAction2 on our data.
+2. The values in columns named after `reference` are copied from paper, and `reference*` are results using [SlowFast](https://github.com/facebookresearch/SlowFast/) repo and trained on our data.
+3. The validation set of Kinetics400 we used consists of 19796 videos. These videos are available at [Kinetics400-Validation](https://mycuhk-my.sharepoint.com/:u:/g/personal/1155136485_link_cuhk_edu_hk/EbXw2WX94J1Hunyt3MWNDJUBz-nHvQYhO9pvKqm6g39PMA?e=a9QldB). The corresponding [data list](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_val_list.txt) (each line is of the format 'video_id, num_frames, label_index') and the [label map](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_class2ind.txt) are also available.
+4. MaskFeat fine-tuning experiment is based on pretrain model from [MMSelfSup](https://github.com/open-mmlab/mmselfsup/tree/dev-1.x/projects/maskfeat_video), and the corresponding reference result is based on pretrain model from [SlowFast](https://github.com/facebookresearch/SlowFast/).
+5. Due to the different versions of Kinetics-400, our training results are different from paper.
+6. Due to the training efficiency, we currently only provide MViT-small training results, we don't ensure other config files' training accuracy and welcome you to contribute your reproduction results.
+7. We use `repeat augment` in MViT training configs following [SlowFast](https://github.com/facebookresearch/SlowFast/). [Repeat augment](https://arxiv.org/pdf/1901.09335.pdf) takes multiple times of data augment for one video, this way can improve the generalization of the model and relieve the IO stress of loading videos. And please note that the actual batch size is `num_repeats` times of `batch_size` in `train_dataloader`.
-| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top1 acc | testing protocol | FLOPs | params | config | ckpt |
+### Inference results
+
+#### Kinetics-400
+
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top5 acc | testing protocol | FLOPs | params | config | ckpt |
| :---------------------: | :--------: | :--------: | :----------: | :------: | :------: | :------------------------------: | :------------------------------: | :--------------: | :---: | :----: | :------------------: | :----------------: |
-| 16x4x1 | 224x224 | MViTv2-S\* | From scratch | 81.1 | 94.7 | [81.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M | [config](/configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth) |
+| 16x4x1 | 224x224 | MViTv2-S\* | From scratch | 81.1 | 94.7 | [81.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M | [config](/configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth) |
| 32x3x1 | 224x224 | MViTv2-B\* | From scratch | 82.6 | 95.8 | [82.9](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [95.7](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 225G | 51.2M | [config](/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-base-p244_32x3x1_kinetics400-rgb_20221021-f392cd2d.pth) |
| 40x3x1 | 312x312 | MViTv2-L\* | From scratch | 85.4 | 96.2 | [86.1](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [97.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 3 crop | 2828G | 213M | [config](/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_40x3x1_kinetics400-rgb_20221021-11fe1f97.pth) |
-### Something-Something V2
+#### Something-Something V2
-| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top1 acc | testing protocol | FLOPs | params | config | ckpt |
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top5 acc | testing protocol | FLOPs | params | config | ckpt |
| :---------------------: | :--------: | :--------: | :----------: | :------: | :------: | :------------------------------: | :------------------------------: | :--------------: | :---: | :----: | :------------------: | :----------------: |
-| uniform 16 | 224x224 | MViTv2-S\* | K400 | 68.1 | 91.0 | [68.2](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [91.4](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 64G | 34.4M | [config](/configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_u16_sthv2-rgb_20221021-65ecae7d.pth) |
+| uniform 16 | 224x224 | MViTv2-S\* | K400 | 68.1 | 91.0 | [68.2](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [91.4](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 64G | 34.4M | [config](/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_u16_sthv2-rgb_20221021-65ecae7d.pth) |
| uniform 32 | 224x224 | MViTv2-B\* | K400 | 70.8 | 92.7 | [70.5](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [92.7](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 225G | 51.1M | [config](/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-base-p244_u32_sthv2-rgb_20221021-d5de5da6.pth) |
| uniform 40 | 312x312 | MViTv2-L\* | IN21K + K400 | 73.2 | 94.0 | [73.3](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.0](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 2828G | 213M | [config](/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_u40_sthv2-rgb_20221021-61696e07.pth) |
-*Models with * are ported from the repo [SlowFast](https://github.com/facebookresearch/SlowFast/) and tested on our data. Currently, we only support the testing of MViT models, training will be available soon.*
+### Training results
+
+#### Kinetics-400
+
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference\* top1 acc | reference\* top5 acc | testing protocol | FLOPs | params | config | ckpt | log |
+| :---------------------: | :--------: | :------: | :-----------: | :------: | :------: | :---------------------------: | :----------------------------: | :---------------: | :---: | :----: | :--------------: | :------------: | :-----------: |
+| 16x4x1 | 224x224 | MViTv2-S | From scratch | 80.6 | 94.7 | [80.8](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M | [config](configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb_20230201-23284ff3.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.log) |
+| 16x4x1 | 224x224 | MViTv2-S | K400 MaskFeat | 81.8 | 95.2 | [81.5](https://github.com/facebookresearch/SlowFast/blob/main/projects/maskfeat/README.md) | [94.9](https://github.com/facebookresearch/SlowFast/blob/main/projects/maskfeat/README.md) | 10 clips x 1 crop | 71G | 36.4M | [config](/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb_20230201-5bced1d0.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.log) |
+
+the corresponding result without repeat augment is as follows:
+
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference\* top1 acc | reference\* top5 acc | testing protocol | FLOPs | params |
+| :---------------------: | :--------: | :------: | :----------: | :------: | :------: | :--------------------------------------------------: | :--------------------------------------------------: | :--------------: | :---: | :----: |
+| 16x4x1 | 224x224 | MViTv2-S | From scratch | 79.4 | 93.9 | [80.8](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [94.6](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 5 clips x 1 crop | 64G | 34.5M |
+
+#### Something-Something V2
-1. The values in columns named after "reference" are copied from paper
-2. The validation set of Kinetics400 we used consists of 19796 videos. These videos are available at [Kinetics400-Validation](https://mycuhk-my.sharepoint.com/:u:/g/personal/1155136485_link_cuhk_edu_hk/EbXw2WX94J1Hunyt3MWNDJUBz-nHvQYhO9pvKqm6g39PMA?e=a9QldB). The corresponding [data list](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_val_list.txt) (each line is of the format 'video_id, num_frames, label_index') and the [label map](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_class2ind.txt) are also available.
+| frame sampling strategy | resolution | backbone | pretrain | top1 acc | top5 acc | reference top1 acc | reference top5 acc | testing protocol | FLOPs | params | config | ckpt | log |
+| :---------------------: | :--------: | :------: | :------: | :------: | :------: | :---------------------------: | :----------------------------: | :--------------: | :---: | :----: | :----------------: | :--------------: | :-------------: |
+| uniform 16 | 224x224 | MViTv2-S | K400 | 68.2 | 91.3 | [68.2](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | [91.4](https://github.com/facebookresearch/SlowFast/blob/main/projects/mvitv2/README.md) | 1 clips x 3 crop | 64G | 34.4M | [config](/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb_20230201-4065c1b9.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.log) |
For more details on data preparation, you can refer to
diff --git a/configs/recognition/mvit/metafile.yml b/configs/recognition/mvit/metafile.yml
index 888fa24732..3170c61bdc 100644
--- a/configs/recognition/mvit/metafile.yml
+++ b/configs/recognition/mvit/metafile.yml
@@ -6,8 +6,8 @@ Collections:
Title: "MViTv2: Improved Multiscale Vision Transformers for Classification and Detection"
Models:
- - Name: mvit-small-p244_16x4x1_kinetics400-rgb
- Config: configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py
+ - Name: mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb_infer
+ Config: configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
In Collection: MViT
Metadata:
Architecture: MViT-small
@@ -24,6 +24,28 @@ Models:
Top 5 Accuracy: 94.7
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth
+ - Name: mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb
+ Config: configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
+ In Collection: MViT
+ Metadata:
+ Architecture: MViT-small
+ Batch Size: 16
+ Epochs: 100
+ FLOPs: 64G
+ Parameters: 34.5M
+ Resolution: 224x224
+ Training Data: Kinetics-400
+ Training Resources: 32 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 80.6
+ Top 5 Accuracy: 94.7
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb_20230201-23284ff3.pth
+
- Name: mvit-base-p244_32x3x1_kinetics400-rgb
Config: configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
In Collection: MViT
@@ -60,8 +82,8 @@ Models:
Top 5 Accuracy: 94.7
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_40x3x1_kinetics400-rgb_20221021-11fe1f97.pth
- - Name: mvit-small-p244_u16_sthv2-rgb
- Config: configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py
+ - Name: mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb_infer
+ Config: configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
In Collection: MViT
Metadata:
Architecture: MViT-small
@@ -78,6 +100,29 @@ Models:
Top 5 Accuracy: 91.0
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_u16_sthv2-rgb_20221021-65ecae7d.pth
+ - Name: mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb
+ Config: configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
+ In Collection: MViT
+ Metadata:
+ Architecture: MViT-small
+ Batch Size: 16
+ Epochs: 100
+ FLOPs: 64G
+ Parameters: 34.4M
+ Pretrained: Kinetics-400
+ Resolution: 224x224
+ Training Data: SthV2
+ Training Resources: 16 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: SthV2
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 68.2
+ Top 5 Accuracy: 91.3
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb_20230201-4065c1b9.pth
+
- Name: mvit-base-p244_u32_sthv2-rgb
Config: configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
In Collection: MViT
@@ -113,3 +158,26 @@ Models:
Top 1 Accuracy: 73.2
Top 5 Accuracy: 94.0
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-large-p244_u40_sthv2-rgb_20221021-61696e07.pth
+
+ - Name: mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb
+ Config: configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py
+ In Collection: MViT
+ Metadata:
+ Architecture: MViT-small
+ Batch Size: 32
+ Epochs: 100
+ FLOPs: 71G
+ Parameters: 36.4M
+ Pretrained: Kinetics-400 MaskFeat
+ Resolution: 224x224
+ Training Data: Kinetics-400
+ Training Resources: 8 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 81.8
+ Top 5 Accuracy: 95.2
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb_20230201-5bced1d0.pth
diff --git a/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py b/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
index b1e186f195..fb552c9329 100644
--- a/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
+++ b/configs/recognition/mvit/mvit-base-p244_32x3x1_kinetics400-rgb.py
@@ -76,13 +76,17 @@
dict(type='PackActionInputs')
]
+repeat_sample = 2
train_dataloader = dict(
batch_size=8,
num_workers=8,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
dataset=dict(
- type=dataset_type,
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ sample_once=True,
ann_file=ann_file_train,
data_prefix=dict(video=data_root),
pipeline=train_pipeline))
@@ -113,19 +117,21 @@
test_evaluator = val_evaluator
train_cfg = dict(
- type='EpochBasedTrainLoop', max_epochs=30, val_begin=1, val_interval=3)
+ type='EpochBasedTrainLoop', max_epochs=200, val_begin=1, val_interval=1)
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
+base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
- type='AdamW', lr=1.6e-3, betas=(0.9, 0.999), weight_decay=0.05))
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0),
+ clip_grad=dict(max_norm=1, norm_type=2))
param_scheduler = [
dict(
type='LinearLR',
- start_factor=0.1,
+ start_factor=0.01,
by_epoch=True,
begin=0,
end=30,
@@ -133,9 +139,9 @@
dict(
type='CosineAnnealingLR',
T_max=200,
- eta_min=0,
+ eta_min=base_lr / 100,
by_epoch=True,
- begin=0,
+ begin=30,
end=200,
convert_to_iter_based=True)
]
@@ -147,4 +153,4 @@
# - `enable` means enable scaling LR automatically
# or not by default.
# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
-auto_scale_lr = dict(enable=False, base_batch_size=64)
+auto_scale_lr = dict(enable=False, base_batch_size=512 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py b/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
index c954b60b54..cdbf22dd1f 100644
--- a/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
+++ b/configs/recognition/mvit/mvit-base-p244_u32_sthv2-rgb.py
@@ -108,7 +108,6 @@
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05))
diff --git a/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py b/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py
index 8c93519914..f2d7ef1419 100644
--- a/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py
+++ b/configs/recognition/mvit/mvit-large-p244_40x3x1_kinetics400-rgb.py
@@ -13,12 +13,6 @@
type='ActionDataPreprocessor',
mean=[114.75, 114.75, 114.75],
std=[57.375, 57.375, 57.375],
- blending=dict(
- type='RandomBatchAugment',
- augments=[
- dict(type='MixupBlending', alpha=0.8, num_classes=400),
- dict(type='CutmixBlending', alpha=1, num_classes=400)
- ]),
format_shape='NCTHW'),
cls_head=dict(in_channels=1152),
test_cfg=dict(max_testing_views=5))
@@ -78,13 +72,17 @@
dict(type='PackActionInputs')
]
+repeat_sample = 2
train_dataloader = dict(
batch_size=8,
num_workers=8,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
dataset=dict(
- type=dataset_type,
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ sample_once=True,
ann_file=ann_file_train,
data_prefix=dict(video=data_root),
pipeline=train_pipeline))
@@ -119,26 +117,21 @@
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
+base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
- type='AdamW', lr=1.6e-3, betas=(0.9, 0.999), weight_decay=0.05))
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=10e-8),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0),
+ clip_grad=dict(max_norm=1, norm_type=2))
param_scheduler = [
- dict(
- type='LinearLR',
- start_factor=0.1,
- by_epoch=True,
- begin=0,
- end=30,
- convert_to_iter_based=True),
dict(
type='CosineAnnealingLR',
- T_max=200,
+ T_max=30,
eta_min=0,
by_epoch=True,
begin=0,
- end=200,
+ end=30,
convert_to_iter_based=True)
]
@@ -149,4 +142,4 @@
# - `enable` means enable scaling LR automatically
# or not by default.
# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
-auto_scale_lr = dict(enable=True, base_batch_size=512)
+auto_scale_lr = dict(enable=True, base_batch_size=128 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py b/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py
index b3fde41a78..ea9d54c068 100644
--- a/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py
+++ b/configs/recognition/mvit/mvit-large-p244_u40_sthv2-rgb.py
@@ -110,7 +110,6 @@
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05))
diff --git a/configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py b/configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
similarity index 91%
rename from configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py
rename to configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
index 4da89b5a4a..9f6b1cbd6d 100644
--- a/configs/recognition/mvit/mvit-small-p244_16x4x1_kinetics400-rgb.py
+++ b/configs/recognition/mvit/mvit-small-p244_32xb16-16x4x1-200e_kinetics400-rgb.py
@@ -24,6 +24,7 @@
ann_file_test = 'data/kinetics400/kinetics400_val_list_videos.txt'
file_client_args = dict(io_backend='disk')
+
train_pipeline = [
dict(type='DecordInit', **file_client_args),
dict(type='SampleFrames', clip_len=16, frame_interval=4, num_clips=1),
@@ -70,13 +71,17 @@
dict(type='PackActionInputs')
]
+repeat_sample = 2
train_dataloader = dict(
batch_size=8,
num_workers=8,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
dataset=dict(
- type=dataset_type,
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ sample_once=True,
ann_file=ann_file_train,
data_prefix=dict(video=data_root),
pipeline=train_pipeline))
@@ -107,20 +112,21 @@
test_evaluator = val_evaluator
train_cfg = dict(
- type='EpochBasedTrainLoop', max_epochs=200, val_begin=1, val_interval=3)
+ type='EpochBasedTrainLoop', max_epochs=200, val_begin=1, val_interval=1)
val_cfg = dict(type='ValLoop')
test_cfg = dict(type='TestLoop')
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
- type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05))
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0),
+ clip_grad=dict(max_norm=1, norm_type=2))
param_scheduler = [
dict(
type='LinearLR',
- start_factor=0.1,
+ start_factor=0.01,
by_epoch=True,
begin=0,
end=30,
@@ -142,4 +148,4 @@
# - `enable` means enable scaling LR automatically
# or not by default.
# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
-auto_scale_lr = dict(enable=True, base_batch_size=512)
+auto_scale_lr = dict(enable=True, base_batch_size=512 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py b/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py
new file mode 100644
index 0000000000..6fa2a5e654
--- /dev/null
+++ b/configs/recognition/mvit/mvit-small-p244_k400-maskfeat-pre_8xb32-16x4x1-100e_kinetics400-rgb.py
@@ -0,0 +1,158 @@
+_base_ = [
+ '../../_base_/models/mvit_small.py', '../../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ drop_path_rate=0.1,
+ dim_mul_in_attention=False,
+ pretrained= # noqa: E251
+ 'https://download.openmmlab.com/mmselfsup/1.x/maskfeat/maskfeat_mvit-small_16xb32-amp-coslr-300e_k400/maskfeat_mvit-small_16xb32-amp-coslr-300e_k400_20230131-87d60b6f.pth', # noqa
+ pretrained_type='maskfeat',
+ ),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ blending=dict(
+ type='RandomBatchAugment',
+ augments=[
+ dict(type='MixupBlending', alpha=0.8, num_classes=400),
+ dict(type='CutmixBlending', alpha=1, num_classes=400)
+ ]),
+ format_shape='NCTHW'),
+ cls_head=dict(dropout_ratio=0., init_scale=0.001))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root = 'data/kinetics400/videos_train'
+data_root_val = 'data/kinetics400/videos_val'
+ann_file_train = 'data/kinetics400/kinetics400_train_list_videos.txt'
+ann_file_val = 'data/kinetics400/kinetics400_val_list_videos.txt'
+ann_file_test = 'data/kinetics400/kinetics400_val_list_videos.txt'
+
+file_client_args = dict(io_backend='disk')
+train_pipeline = [
+ dict(type='DecordInit', **file_client_args),
+ dict(type='SampleFrames', clip_len=16, frame_interval=4, num_clips=1),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 256)),
+ dict(type='PytorchVideoWrapper', op='RandAugment', magnitude=7),
+ dict(type='RandomResizedCrop'),
+ dict(type='Resize', scale=(224, 224), keep_ratio=False),
+ dict(type='Flip', flip_ratio=0.5),
+ dict(type='RandomErasing', erase_prob=0.25, mode='rand'),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+val_pipeline = [
+ dict(type='DecordInit', **file_client_args),
+ dict(
+ type='SampleFrames',
+ clip_len=16,
+ frame_interval=4,
+ num_clips=1,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 256)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+test_pipeline = [
+ dict(type='DecordInit', **file_client_args),
+ dict(
+ type='SampleFrames',
+ clip_len=16,
+ frame_interval=4,
+ num_clips=10,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+repeat_sample = 2
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ collate_fn=dict(type='repeat_pseudo_collate'),
+ dataset=dict(
+ type='RepeatAugDataset',
+ num_repeats=repeat_sample,
+ ann_file=ann_file_train,
+ data_prefix=dict(video=data_root),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=8,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_val,
+ data_prefix=dict(video=data_root_val),
+ pipeline=val_pipeline,
+ test_mode=True))
+test_dataloader = dict(
+ batch_size=1,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True))
+
+val_evaluator = dict(type='AccMetric')
+test_evaluator = val_evaluator
+
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=100, val_begin=1, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+base_lr = 9.6e-3 # for batch size 512
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
+ constructor='LearningRateDecayOptimizerConstructor',
+ paramwise_cfg={
+ 'decay_rate': 0.75,
+ 'decay_type': 'layer_wise',
+ 'num_layers': 16
+ },
+ clip_grad=dict(max_norm=5, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1 / 600,
+ by_epoch=True,
+ begin=0,
+ end=20,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ T_max=80,
+ eta_min_ratio=1 / 600,
+ by_epoch=True,
+ begin=20,
+ end=100,
+ convert_to_iter_based=True)
+]
+
+default_hooks = dict(
+ checkpoint=dict(interval=3, max_keep_ckpts=20), logger=dict(interval=100))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (8 samples per GPU).
+auto_scale_lr = dict(enable=True, base_batch_size=512 // repeat_sample)
diff --git a/configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py b/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
similarity index 91%
rename from configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py
rename to configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
index 08934b9a5e..1b4135b52e 100644
--- a/configs/recognition/mvit/mvit-small-p244_u16_sthv2-rgb.py
+++ b/configs/recognition/mvit/mvit-small-p244_k400-pre_16xb16-u16-100e_sthv2-rgb.py
@@ -2,7 +2,14 @@
'../../_base_/models/mvit_small.py', '../../_base_/default_runtime.py'
]
-model = dict(cls_head=dict(num_classes=174))
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmaction/v1.0/recognition/mvit/converted/mvit-small-p244_16x4x1_kinetics400-rgb_20221021-9ebaaeed.pth', # noqa: E501
+ prefix='backbone.')),
+ cls_head=dict(num_classes=174))
# dataset settings
dataset_type = 'VideoDataset'
@@ -91,7 +98,6 @@
base_lr = 1.6e-3
optim_wrapper = dict(
- type='AmpOptimWrapper',
optimizer=dict(
type='AdamW', lr=base_lr, betas=(0.9, 0.999), weight_decay=0.05),
paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0))
diff --git a/configs/recognition/omnisource/README.md b/configs/recognition/omnisource/README.md
new file mode 100644
index 0000000000..64acf52c35
--- /dev/null
+++ b/configs/recognition/omnisource/README.md
@@ -0,0 +1,79 @@
+# Omnisource
+
+
+
+
+
+## Abstract
+
+
+
+We propose to train a recognizer that can classify images and videos. The recognizer is jointly trained on image and video datasets. Compared with pre-training on the same image dataset, this method can significantly improve the video recognition performance.
+
+
+
+## Results and Models
+
+### Kinetics-400
+
+| frame sampling strategy | scheduler | resolution | gpus | backbone | joint-training | top1 acc | top5 acc | testing protocol | FLOPs | params | config | ckpt | log |
+| :---------------------: | :-----------: | :--------: | :--: | :------: | :------------: | :------: | :------: | :---------------: | :----: | :----: | :---------------------------: | :-------------------------: | :-------------------------: |
+| 8x8x1 | Linear+Cosine | 224x224 | 8 | ResNet50 | ImageNet | 77.30 | 93.23 | 10 clips x 3 crop | 54.75G | 32.45M | [config](/configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb_20230208-61c4be0d.pth) | [log](https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.log) |
+
+1. The **gpus** indicates the number of gpus we used to get the checkpoint. If you want to use a different number of gpus or videos per gpu, the best way is to set `--auto-scale-lr` when calling `tools/train.py`, this parameter will auto-scale the learning rate according to the actual batch size and the original batch size.
+2. The validation set of Kinetics400 we used consists of 19796 videos. These videos are available at [Kinetics400-Validation](https://mycuhk-my.sharepoint.com/:u:/g/personal/1155136485_link_cuhk_edu_hk/EbXw2WX94J1Hunyt3MWNDJUBz-nHvQYhO9pvKqm6g39PMA?e=a9QldB). The corresponding [data list](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_val_list.txt) (each line is of the format 'video_id, num_frames, label_index') and the [label map](https://download.openmmlab.com/mmaction/dataset/k400_val/kinetics_class2ind.txt) are also available.
+
+For more details on data preparation, you can refer to [Kinetics400](/tools/data/kinetics/README.md).
+
+## Train
+
+You can use the following command to train a model.
+
+```shell
+python tools/train.py ${CONFIG_FILE} [optional arguments]
+```
+
+Example: train SlowOnly model on Kinetics-400 dataset in a deterministic option with periodic validation.
+
+```shell
+python tools/train.py configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py \
+ --seed=0 --deterministic
+```
+
+We found that the training of this Omnisource model could crash for unknown reasons. If this happens, you can resume training by adding the `--cfg-options resume=True` to the training script.
+
+For more details, you can refer to the **Training** part in the [Training and Test Tutorial](/docs/en/user_guides/4_train_test.md).
+
+## Test
+
+You can use the following command to test a model.
+
+```shell
+python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [optional arguments]
+```
+
+Example: test SlowOnly model on Kinetics-400 dataset and dump the result to a pkl file.
+
+```shell
+python tools/test.py configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py \
+ checkpoints/SOME_CHECKPOINT.pth --dump result.pkl
+```
+
+For more details, you can refer to the **Test** part in the [Training and Test Tutorial](/docs/en/user_guides/4_train_test.md).
+
+## Citation
+
+```BibTeX
+@inproceedings{feichtenhofer2019slowfast,
+ title={Slowfast networks for video recognition},
+ author={Feichtenhofer, Christoph and Fan, Haoqi and Malik, Jitendra and He, Kaiming},
+ booktitle={Proceedings of the IEEE international conference on computer vision},
+ pages={6202--6211},
+ year={2019}
+}
+```
diff --git a/configs/recognition/omnisource/metafile.yml b/configs/recognition/omnisource/metafile.yml
new file mode 100644
index 0000000000..af4524e5b0
--- /dev/null
+++ b/configs/recognition/omnisource/metafile.yml
@@ -0,0 +1,28 @@
+Collections:
+ - Name: Omnisource
+ README: configs/recognition/omnisource/README.md
+
+
+Models:
+ - Name: slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb
+ Config: configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
+ In Collection: SlowOnly
+ Metadata:
+ Architecture: ResNet50
+ Batch Size: 16
+ Epochs: 256
+ FLOPs: 54.75G
+ Parameters: 32.45M
+ Pretrained: None
+ Resolution: short-side 320
+ Training Data: Kinetics-400
+ Training Resources: 8 GPUs
+ Modality: RGB
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 77.30
+ Top 5 Accuracy: 93.23
+ Training Log: https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.log
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb_20230208-61c4be0d.pth
diff --git a/configs/recognition/omnisource/slowonly_r50_16xb16-8x8x1-256e_imagenet-kinetics400-rgb.py b/configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
similarity index 98%
rename from configs/recognition/omnisource/slowonly_r50_16xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
rename to configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
index 05feb2710a..2b28285635 100644
--- a/configs/recognition/omnisource/slowonly_r50_16xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
+++ b/configs/recognition/omnisource/slowonly_r50_8xb16-8x8x1-256e_imagenet-kinetics400-rgb.py
@@ -159,7 +159,7 @@
convert_to_iter_based=True)
]
"""
-The learning rate is for total_batch_size = 16 x 16 (num_gpus x batch_size)
+The learning rate is for total_batch_size = 8 x 16 (num_gpus x batch_size)
If you want to use other batch size or number of GPU settings, please update
the learning rate with the linear scaling rule.
"""
diff --git a/configs/recognition/slowfast/metafile.yml b/configs/recognition/slowfast/metafile.yml
index 94423659d1..7ba12c0e63 100644
--- a/configs/recognition/slowfast/metafile.yml
+++ b/configs/recognition/slowfast/metafile.yml
@@ -30,6 +30,8 @@ Models:
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/slowfast/slowfast_r50_8xb8-4x16x1-256e_kinetics400-rgb/slowfast_r50_8xb8-4x16x1-256e_kinetics400-rgb_20220901-701b0f6f.pth
- Name: slowfast_r50_8xb8-8x8x1-256e_kinetics400-rgb
+ Alias:
+ - slowfast
Config: configs/recognition/slowfast/slowfast_r50_8xb8-8x8x1-256e_kinetics400-rgb.py
In Collection: SlowFast
Metadata:
diff --git a/configs/recognition/tsn/metafile.yml b/configs/recognition/tsn/metafile.yml
index b4734c93a2..e618ed71cc 100644
--- a/configs/recognition/tsn/metafile.yml
+++ b/configs/recognition/tsn/metafile.yml
@@ -53,6 +53,8 @@ Models:
Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/tsn/tsn_imagenet-pretrained-r50_8xb32-1x1x5-100e_kinetics400-rgb/tsn_imagenet-pretrained-r50_8xb32-1x1x5-100e_kinetics400-rgb_20220906-65d68713.pth
- Name: tsn_imagenet-pretrained-r50_8xb32-1x1x8-100e_kinetics400-rgb
+ Alias:
+ - TSN
Config: configs/recognition/tsn/tsn_imagenet-pretrained-r50_8xb32-1x1x8-100e_kinetics400-rgb.py
In Collection: TSN
Metadata:
diff --git a/configs/recognition/uniformer/README.md b/configs/recognition/uniformer/README.md
new file mode 100644
index 0000000000..65c224ecc3
--- /dev/null
+++ b/configs/recognition/uniformer/README.md
@@ -0,0 +1,67 @@
+# UniFormer
+
+[UniFormer: Unified Transformer for Efficient Spatiotemporal Representation Learning](https://arxiv.org/abs/2201.04676)
+
+
+
+## Abstract
+
+
+
+It is a challenging task to learn rich and multi-scale spatiotemporal semantics from high-dimensional videos, due to large local redundancy and complex global dependency between video frames. The recent advances in this research have been mainly driven by 3D convolutional neural networks and vision transformers. Although 3D convolution can efficiently aggregate local context to suppress local redundancy from a small 3D neighborhood, it lacks the capability to capture global dependency because of the limited receptive field. Alternatively, vision transformers can effectively capture long-range dependency by self-attention mechanism, while having the limitation on reducing local redundancy with blind similarity comparison among all the tokens in each layer. Based on these observations, we propose a novel Unified transFormer (UniFormer) which seamlessly integrates merits of 3D convolution and spatiotemporal self-attention in a concise transformer format, and achieves a preferable balance between computation and accuracy. Different from traditional transformers, our relation aggregator can tackle both spatiotemporal redundancy and dependency, by learning local and global token affinity respectively in shallow and deep layers. We conduct extensive experiments on the popular video benchmarks, e.g., Kinetics-400, Kinetics-600, and Something-Something V1&V2. With only ImageNet-1K pretraining, our UniFormer achieves 82.9%/84.8% top-1 accuracy on Kinetics-400/Kinetics-600, while requiring 10x fewer GFLOPs than other state-of-the-art methods. For Something-Something V1 and V2, our UniFormer achieves new state-of-the-art performances of 60.9% and 71.2% top-1 accuracy respectively.
+
+
+
+
+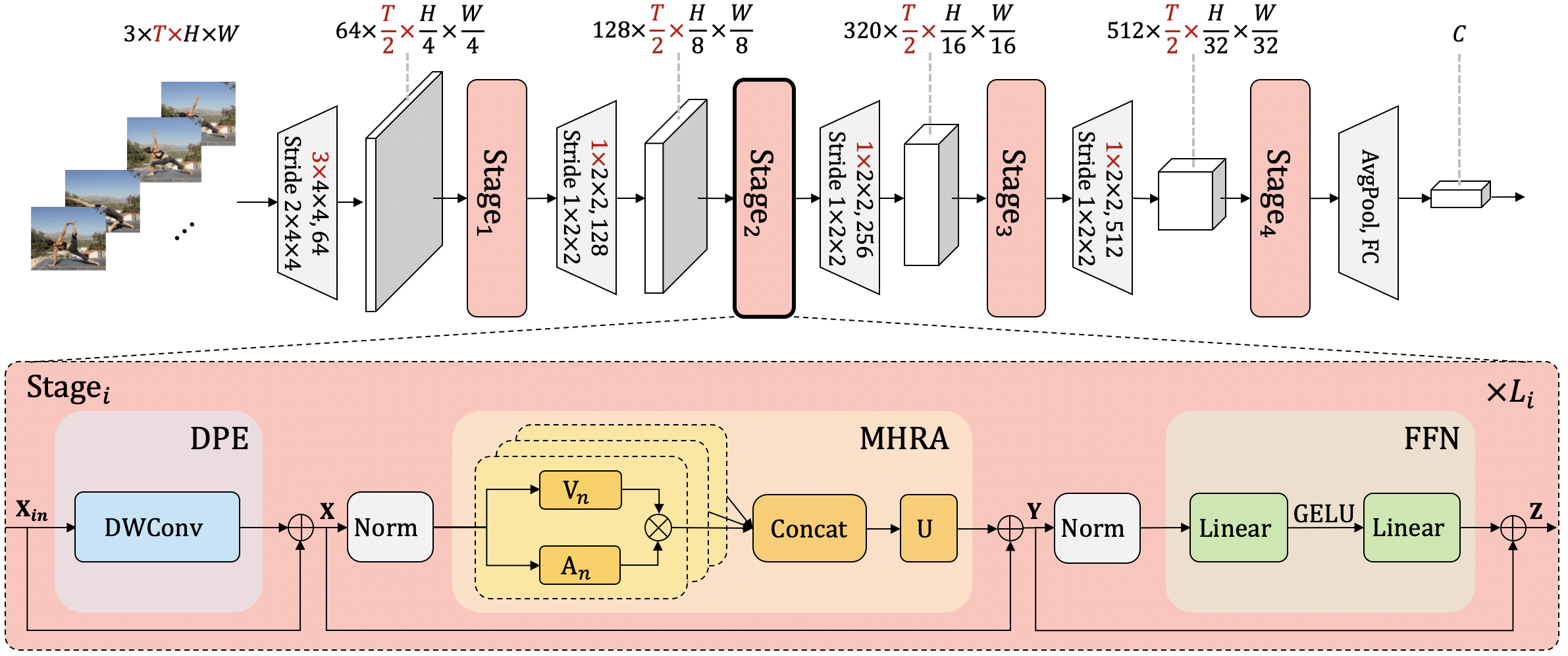 +
+
+
+## Results and Models
+
+### Kinetics-400
+
+| frame sampling strategy | resolution | backbone | top1 acc | top5 acc | [reference](<(https://github.com/Sense-X/UniFormer/blob/main/video_classification/README.md)>) top1 acc | [reference](<(https://github.com/Sense-X/UniFormer/blob/main/video_classification/README.md)>) top5 acc | mm-Kinetics top1 acc | mm-Kinetics top5 acc | testing protocol | FLOPs | params | config | ckpt |
+| :---------------------: | :------------: | :---------: | :------: | :------: | :-----------------------------------------------------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------: | :------------------: | :------------------: | :--------------: | :---: | :----: | :-----------------------------------------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| 16x4x1 | short-side 320 | UniFormer-S | 80.9 | 94.6 | 80.8 | 94.7 | 80.9 | 94.6 | 4 clips x 1 crop | 41.8G | 21.4M | [config](/configs/recognition/uniformer/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv1/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb_20221219-c630a037.pth) |
+| 16x4x1 | short-side 320 | UniFormer-B | 82.0 | 95.0 | 82.0 | 95.1 | 82.0 | 95.0 | 4 clips x 1 crop | 96.7G | 49.8M | [config](/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv1/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb_20221219-157c2e66.pth) |
+| 32x4x1 | short-side 320 | UniFormer-B | 83.1 | 95.3 | 82.9 | 95.4 | 83.0 | 95.3 | 4 clips x 1 crop | 59G | 49.8M | [config](/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv1/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb_20221219-b776322c.pth) |
+
+The models are ported from the repo [UniFormer](https://github.com/Sense-X/UniFormer/blob/main/video_classification/README.md) and tested on our data. Currently, we only support the testing of UniFormer models, training will be available soon.
+
+1. The values in columns named after "reference" are the results of the original repo.
+2. The values in `top1/5 acc` is tested on the same data list as the original repo, and the label map is provided by [UniFormer](https://drive.google.com/drive/folders/17VB-XdF3Kfr9ORmnGyXCxTMs86n0L4QL). The total videos are available at [Kinetics400](https://pan.baidu.com/s/1t5K0FRz3PGAT-37-3FwAfg) (BaiduYun password: g5kp), which consists of 19787 videos.
+3. The values in columns named after "mm-Kinetics" are the testing results on the Kinetics dataset held by MMAction2, which is also used by other models in MMAction2. Due to the differences between various versions of Kinetics dataset, there is a little gap between `top1/5 acc` and `mm-Kinetics top1/5 acc`. For a fair comparison with other models, we report both results here. Note that we simply report the inference results, since the training set is different between UniFormer and other models, the results are lower than that tested on the author's version.
+4. Since the original models for Kinetics-400/600/700 adopt different [label file](https://drive.google.com/drive/folders/17VB-XdF3Kfr9ORmnGyXCxTMs86n0L4QL), we simply map the weight according to the label name. New label map for Kinetics-400/600/700 can be found [here](https://github.com/open-mmlab/mmaction2/tree/dev-1.x/tools/data/kinetics).
+5. Due to some difference between [SlowFast](https://github.com/facebookresearch/SlowFast) and MMAction, there are some gaps between their performances.
+
+For more details on data preparation, you can refer to [preparing_kinetics](/tools/data/kinetics/README.md).
+
+## Test
+
+You can use the following command to test a model.
+
+```shell
+python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [optional arguments]
+```
+
+Example: test UniFormer-S model on Kinetics-400 dataset and dump the result to a pkl file.
+
+```shell
+python tools/test.py configs/recognition/uniformer/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb.py \
+ checkpoints/SOME_CHECKPOINT.pth --dump result.pkl
+```
+
+For more details, you can refer to the **Test** part in the [Training and Test Tutorial](/docs/en/user_guides/4_train_test.md).
+
+## Citation
+
+```BibTeX
+@inproceedings{
+ li2022uniformer,
+ title={UniFormer: Unified Transformer for Efficient Spatial-Temporal Representation Learning},
+ author={Kunchang Li and Yali Wang and Gao Peng and Guanglu Song and Yu Liu and Hongsheng Li and Yu Qiao},
+ booktitle={International Conference on Learning Representations},
+ year={2022},
+ url={https://openreview.net/forum?id=nBU_u6DLvoK}
+}
+```
diff --git a/configs/recognition/uniformer/metafile.yml b/configs/recognition/uniformer/metafile.yml
new file mode 100644
index 0000000000..8bcfefe450
--- /dev/null
+++ b/configs/recognition/uniformer/metafile.yml
@@ -0,0 +1,70 @@
+Collections:
+- Name: UniFormer
+ README: configs/recognition/uniformer/README.md
+ Paper:
+ URL: https://arxiv.org/abs/2201.04676
+ Title: "UniFormer: Unified Transformer for Efficient Spatiotemporal Representation Learning"
+
+Models:
+ - Name: uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb
+ Config: configs/recognition/uniformer/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormer-S
+ Pretrained: ImageNet-1K
+ Resolution: short-side 320
+ Frame: 16
+ Sampling rate: 4
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/Sense-X/UniFormer/blob/main/video_classification/README.md
+ Code: https://github.com/Sense-X/UniFormer/tree/main/video_classification
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 80.9
+ Top 5 Accuracy: 94.6
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv1/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb_20221219-c630a037.pth
+
+ - Name: uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb
+ Config: configs/recognition/uniformer/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormer-B
+ Pretrained: ImageNet-1K
+ Resolution: short-side 320
+ Frame: 16
+ Sampling rate: 4
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/Sense-X/UniFormer/blob/main/video_classification/README.md
+ Code: https://github.com/Sense-X/UniFormer/tree/main/video_classification
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 82.0
+ Top 5 Accuracy: 95.0
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv1/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb_20221219-157c2e66.pth
+
+ - Name: uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb
+ Config: configs/recognition/uniformer/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormer-B
+ Pretrained: ImageNet-1K
+ Resolution: short-side 320
+ Frame: 32
+ Sampling rate: 4
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/Sense-X/UniFormer/blob/main/video_classification/README.md
+ Code: https://github.com/Sense-X/UniFormer/tree/main/video_classification
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 83.1
+ Top 5 Accuracy: 95.3
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv1/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb_20221219-b776322c.pth
diff --git a/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb.py b/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb.py
new file mode 100644
index 0000000000..459dc58883
--- /dev/null
+++ b/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_16x4x1_kinetics400-rgb.py
@@ -0,0 +1,58 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormer',
+ depth=[5, 8, 20, 7],
+ embed_dim=[64, 128, 320, 512],
+ head_dim=64,
+ drop_path_rate=0.3),
+ cls_head=dict(
+ type='I3DHead',
+ dropout_ratio=0.,
+ num_classes=400,
+ in_channels=512,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='SampleFrames',
+ clip_len=16,
+ frame_interval=4,
+ num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb.py b/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb.py
new file mode 100644
index 0000000000..9f425b6542
--- /dev/null
+++ b/configs/recognition/uniformer/uniformer-base_imagenet1k-pre_32x4x1_kinetics400-rgb.py
@@ -0,0 +1,58 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormer',
+ depth=[5, 8, 20, 7],
+ embed_dim=[64, 128, 320, 512],
+ head_dim=64,
+ drop_path_rate=0.3),
+ cls_head=dict(
+ type='I3DHead',
+ dropout_ratio=0.,
+ num_classes=400,
+ in_channels=512,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='SampleFrames',
+ clip_len=32,
+ frame_interval=4,
+ num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformer/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb.py b/configs/recognition/uniformer/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb.py
new file mode 100644
index 0000000000..9b4ed546c2
--- /dev/null
+++ b/configs/recognition/uniformer/uniformer-small_imagenet1k-pre_16x4x1_kinetics400-rgb.py
@@ -0,0 +1,58 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormer',
+ depth=[3, 4, 8, 3],
+ embed_dim=[64, 128, 320, 512],
+ head_dim=64,
+ drop_path_rate=0.1),
+ cls_head=dict(
+ type='I3DHead',
+ dropout_ratio=0.,
+ num_classes=400,
+ in_channels=512,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='SampleFrames',
+ clip_len=16,
+ frame_interval=4,
+ num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='CenterCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/README.md b/configs/recognition/uniformerv2/README.md
new file mode 100644
index 0000000000..c69b69a662
--- /dev/null
+++ b/configs/recognition/uniformerv2/README.md
@@ -0,0 +1,108 @@
+# UniFormerV2
+
+[UniFormerV2: Spatiotemporal Learning by Arming Image ViTs with Video UniFormer](https://arxiv.org/abs/2211.09552)
+
+
+
+## Abstract
+
+
+
+Learning discriminative spatiotemporal representation is the key problem of video understanding. Recently, Vision Transformers (ViTs) have shown their power in learning long-term video dependency with self-attention. Unfortunately, they exhibit limitations in tackling local video redundancy, due to the blind global comparison among tokens. UniFormer has successfully alleviated this issue, by unifying convolution and self-attention as a relation aggregator in the transformer format. However, this model has to require a tiresome and complicated image-pretraining phrase, before being finetuned on videos. This blocks its wide usage in practice. On the contrary, open-sourced ViTs are readily available and well-pretrained with rich image supervision. Based on these observations, we propose a generic paradigm to build a powerful family of video networks, by arming the pretrained ViTs with efficient UniFormer designs. We call this family UniFormerV2, since it inherits the concise style of the UniFormer block. But it contains brand-new local and global relation aggregators, which allow for preferable accuracy-computation balance by seamlessly integrating advantages from both ViTs and UniFormer. Without any bells and whistles, our UniFormerV2 gets the state-of-the-art recognition performance on 8 popular video benchmarks, including scene-related Kinetics-400/600/700 and Moments in Time, temporal-related Something-Something V1/V2, untrimmed ActivityNet and HACS. In particular, it is the first model to achieve 90% top-1 accuracy on Kinetics-400, to our best knowledge.
+
+
+
+
+
+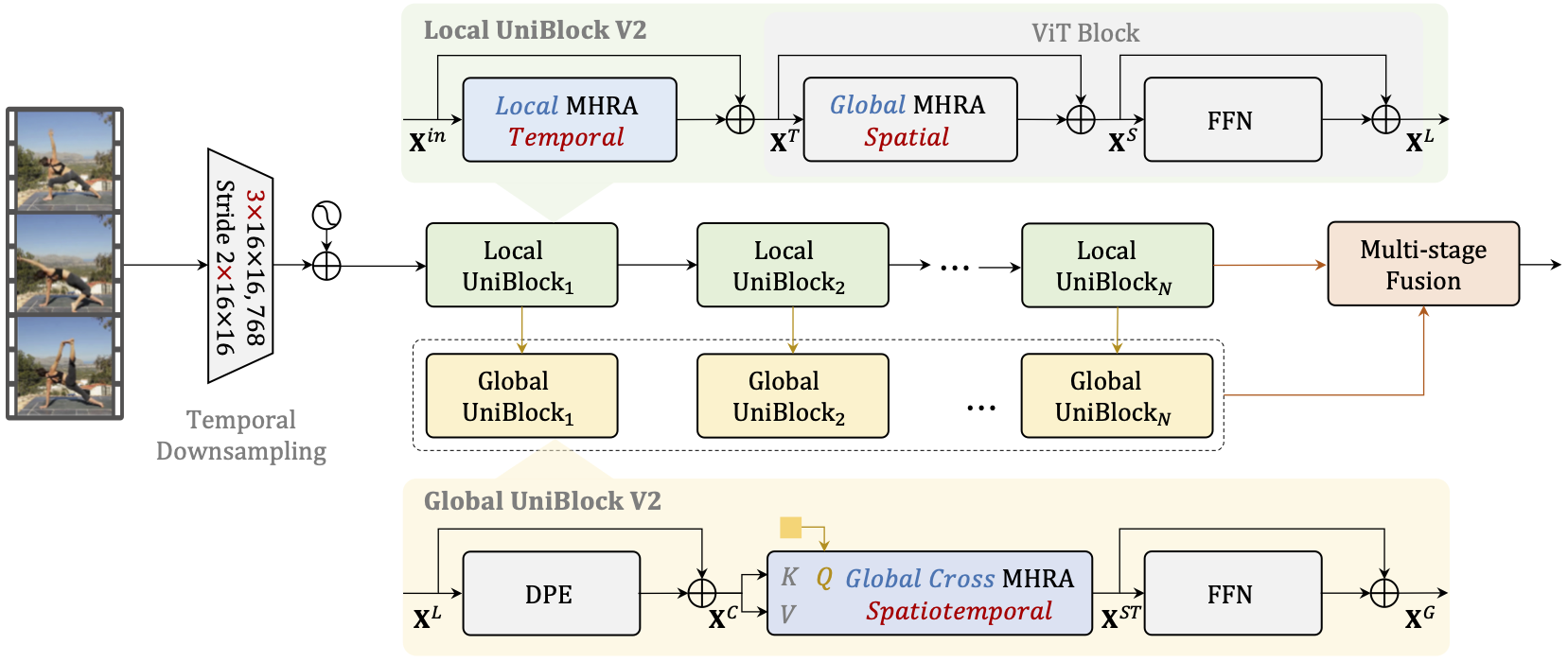 +
+
+
+## Results and Models
+
+### Kinetics-400
+
+| uniform sampling | resolution | backbone | top1 acc | top5 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top1 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top5 acc | mm-Kinetics top1 acc | mm-Kinetics top5 acc | testing protocol | FLOPs | params | config | ckpt |
+| :--------------: | :------------: | :------------------: | :------: | :------: | :---------------------------------------------------------------------------------------: | :---------------------------------------------------------------------------------------: | :------------------: | :------------------: | :--------------: | :---: | :----: | :-----------------------------------------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| 8 | short-side 320 | UniFormerV2-B/16 | 85.8 | 97.1 | 85.6 | 97.0 | 85.8 | 97.1 | 4 clips x 3 crop | 0.1T | 115M | [config](/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb_20221219-203d6aac.pth) |
+| 8 | short-side 320 | UniFormerV2-L/14 | 88.7 | 98.1 | 88.8 | 98.1 | 88.7 | 98.1 | 4 clips x 3 crop | 0.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb_20221219-972ea063.pth) |
+| 16 | short-side 320 | UniFormerV2-L/14 | 89.0 | 98.2 | 89.1 | 98.2 | 89.0 | 98.2 | 4 clips x 3 crop | 1.3T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb_20221219-6dc86d05.pth) |
+| 32 | short-side 320 | UniFormerV2-L/14 | 89.3 | 98.2 | 89.3 | 98.2 | 89.4 | 98.2 | 2 clips x 3 crop | 2.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb_20221219-56a46f64.pth) |
+| 32 | short-side 320 | UniFormerV2-L/14@336 | 89.5 | 98.4 | 89.7 | 98.3 | 89.5 | 98.4 | 2 clips x 3 crop | 6.3T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb_20221219-1dd7650f.pth) |
+
+### Kinetics-600
+
+| uniform sampling | resolution | backbone | top1 acc | top5 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top1 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top5 acc | mm-Kinetics top1 acc | mm-Kinetics top5 acc | testing protocol | FLOPs | params | config | ckpt |
+| :--------------: | :--------: | :------------------: | :------: | :------: | :---------------------------------------------------------------------------------------: | :---------------------------------------------------------------------------------------: | :------------------: | :------------------: | :--------------: | :---: | :----: | :-----------------------------------------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| 8 | Raw | UniFormerV2-B/16 | 86.4 | 97.3 | 86.1 | 97.2 | 85.5 | 97.0 | 4 clips x 3 crop | 0.1T | 115M | [config](/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb_20221219-c62c4da4.pth) |
+| 8 | Raw | UniFormerV2-L/14 | 89.0 | 98.3 | 89.0 | 98.2 | 87.5 | 98.0 | 4 clips x 3 crop | 0.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb_20221219-cf88e4c2.pth) |
+| 16 | Raw | UniFormerV2-L/14 | 89.4 | 98.3 | 89.4 | 98.3 | 87.8 | 98.0 | 4 clips x 3 crop | 1.3T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb_20221219-38ff0e3e.pth) |
+| 32 | Raw | UniFormerV2-L/14 | 89.2 | 98.3 | 89.5 | 98.3 | 87.7 | 98.1 | 2 clips x 3 crop | 2.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb_20221219-d450d071.pth) |
+| 32 | Raw | UniFormerV2-L/14@336 | 89.8 | 98.5 | 89.9 | 98.5 | 88.8 | 98.3 | 2 clips x 3 crop | 6.3T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb_20221219-f984f5d2.pth) |
+
+### Kinetics-700
+
+| uniform sampling | resolution | backbone | top1 acc | top5 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top1 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top5 acc | mm-Kinetics top1 acc | mm-Kinetics top5 acc | testing protocol | FLOPs | params | config | ckpt |
+| :--------------: | :--------: | :------------------: | :------: | :------: | :---------------------------------------------------------------------------------------: | :---------------------------------------------------------------------------------------: | :------------------: | :------------------: | :--------------: | :---: | :----: | :-----------------------------------------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| 8 | Raw | UniFormerV2-B/16 | 76.3 | 92.9 | 76.3 | 92.7 | 75.1 | 92.5 | 4 clips x 3 crop | 0.1T | 115M | [config](/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb_20221219-8a7c4ac4.pth) |
+| 8 | Raw | UniFormerV2-L/14 | 80.8 | 95.2 | 80.8 | 95.4 | 79.4 | 94.8 | 4 clips x 3 crop | 0.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb_20221219-bfb9f401.pth) |
+| 16 | Raw | UniFormerV2-L/14 | 81.2 | 95.6 | 81.2 | 95.6 | 79.2 | 95.0 | 4 clips x 3 crop | 1.3T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb_20221219-745209d2.pth) |
+| 32 | Raw | UniFormerV2-L/14 | 81.4 | 95.7 | 81.5 | 95.7 | 79.8 | 95.3 | 2 clips x 3 crop | 2.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb_20221219-eebe7056.pth) |
+| 32 | Raw | UniFormerV2-L/14@336 | 82.1 | 96.0 | 82.1 | 96.1 | 80.6 | 95.6 | 2 clips x 3 crop | 6.3T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb_20221219-95cf9046.pth) |
+
+### MiTv1
+
+| uniform sampling | resolution | backbone | top1 acc | top5 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top1 acc | [reference](<(https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md)>) top5 acc | testing protocol | FLOPs | params | config | ckpt |
+| :--------------: | :--------: | :------------------: | :------: | :------: | :---------------------------------------------------------------------------------------: | :---------------------------------------------------------------------------------------: | :--------------: | :---: | :----: | :------------------------------------------------------------------------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| 8 | Raw | UniFormerV2-B/16 | 42.7 | 71.6 | 42.6 | 71.7 | 4 clips x 3 crop | 0.1T | 115M | [config](/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/mitv1/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb_20221219-fddbc786.pth) |
+| 8 | Raw | UniFormerV2-L/14 | 47.0 | 76.1 | 47.0 | 76.1 | 4 clips x 3 crop | 0.7T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/mitv1/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb_20221219-882c0598.pth) |
+| 8 | Raw | UniFormerV2-L/14@336 | 47.7 | 76.8 | 47.8 | 76.0 | 4 clips x 3 crop | 1.6T | 354M | [config](/configs/recognition/uniformerv2/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/mitv1/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb_20221219-9020986e.pth) |
+
+### Kinetics-710
+
+| uniform sampling | resolution | backbone | config | ckpt |
+| :--------------: | :--------: | :------------------: | :----------------------------------------------------------------------------: | :--------------------------------------------------------------------------: |
+| 8 | Raw | UniFormerV2-B/16 | [config](/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics710/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb_20221219-77d34f81.pth) |
+| 8 | Raw | UniFormerV2-L/14 | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-pre_u8_kinetics710-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics710/uniformerv2-large-p14-res224_clip-pre_u8_kinetics710-rgb_20221219-bfaae587.pth) |
+| 8 | Raw | UniFormerV2-L/14@336 | [config](/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb.py) | [ckpt](https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics710/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb_20221219-55878cdc.pth) |
+
+The models are ported from the repo [UniFormerV2](https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md) and tested on our data. Currently, we only support the testing of UniFormerV2 models, training will be available soon.
+
+1. The values in columns named after "reference" are the results of the original repo.
+2. The values in `top1/5 acc` is tested on the same data list as the original repo, and the label map is provided by [UniFormerV2](https://drive.google.com/drive/folders/17VB-XdF3Kfr9ORmnGyXCxTMs86n0L4QL).
+3. The values in columns named after "mm-Kinetics" are the testing results on the Kinetics dataset held by MMAction2, which is also used by other models in MMAction2. Due to the differences between various versions of Kinetics dataset, there is a little gap between `top1/5 acc` and `mm-Kinetics top1/5 acc`. For a fair comparison with other models, we report both results here. Note that we simply report the inference results, since the training set is different between UniFormer and other models, the results are lower than that tested on the author's version.
+4. Since the original models for Kinetics-400/600/700 adopt different [label file](https://drive.google.com/drive/folders/17VB-XdF3Kfr9ORmnGyXCxTMs86n0L4QL), we simply map the weight according to the label name. New label map for Kinetics-400/600/700 can be found [here](https://github.com/open-mmlab/mmaction2/tree/dev-1.x/tools/data/kinetics).
+5. Due to some differences between [SlowFast](https://github.com/facebookresearch/SlowFast) and MMAction2, there are some gaps between their performances.
+6. Kinetics-710 is used for pretraining, which helps improve the performance on other datasets efficiently. You can find more details in the [paper](https://arxiv.org/abs/2211.09552).
+
+For more details on data preparation, you can refer to
+
+- [preparing_kinetics](/tools/data/kinetics/README.md)
+- [preparing_mit](/tools/data/mit/README.md)
+
+## Test
+
+You can use the following command to test a model.
+
+```shell
+python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [optional arguments]
+```
+
+Example: test UniFormerV2-B/16 model on Kinetics-400 dataset and dump the result to a pkl file.
+
+```shell
+python tools/test.py configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py \
+ checkpoints/SOME_CHECKPOINT.pth --dump result.pkl
+```
+
+For more details, you can refer to the **Test** part in the [Training and Test Tutorial](/docs/en/user_guides/4_train_test.md).
+
+## Citation
+
+```BibTeX
+@article{Li2022UniFormerV2SL,
+ title={UniFormerV2: Spatiotemporal Learning by Arming Image ViTs with Video UniFormer},
+ author={Kunchang Li and Yali Wang and Yinan He and Yizhuo Li and Yi Wang and Limin Wang and Y. Qiao},
+ journal={ArXiv},
+ year={2022},
+ volume={abs/2211.09552}
+}
+```
diff --git a/configs/recognition/uniformerv2/metafile.yml b/configs/recognition/uniformerv2/metafile.yml
new file mode 100644
index 0000000000..acd35d3443
--- /dev/null
+++ b/configs/recognition/uniformerv2/metafile.yml
@@ -0,0 +1,414 @@
+Collections:
+- Name: UniFormerV2
+ README: configs/recognition/uniformerv2/README.md
+ Paper:
+ URL: https://arxiv.org/abs/2211.09552
+ Title: "UniFormerV2: Spatiotemporal Learning by Arming Image ViTs with Video UniFormer"
+
+Models:
+ - Name: uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-B/16
+ Pretrained: Kinetics-710
+ Resolution: short-side 320
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 85.8
+ Top 5 Accuracy: 97.1
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb_20221219-203d6aac.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Resolution: short-side 320
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 88.7
+ Top 5 Accuracy: 98.1
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb_20221219-972ea063.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Resolution: short-side 320
+ Frame: 16
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.0
+ Top 5 Accuracy: 98.2
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb_20221219-6dc86d05.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Resolution: short-side 320
+ Frame: 32
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.3
+ Top 5 Accuracy: 98.2
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb_20221219-56a46f64.pth
+
+ - Name: uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14@336
+ Pretrained: Kinetics-710
+ Resolution: short-side 320
+ Frame: 32
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.5
+ Top 5 Accuracy: 98.4
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics400/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb_20221219-1dd7650f.pth
+
+ - Name: uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-B/16
+ Pretrained: Kinetics-710
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-600
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 86.4
+ Top 5 Accuracy: 97.3
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb_20221219-c62c4da4.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-600
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.0
+ Top 5 Accuracy: 98.3
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb_20221219-cf88e4c2.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Frame: 16
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-600
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.4
+ Top 5 Accuracy: 98.3
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb_20221219-38ff0e3e.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Frame: 32
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-600
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.2
+ Top 5 Accuracy: 98.3
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb_20221219-d450d071.pth
+
+ - Name: uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14@336
+ Pretrained: Kinetics-710
+ Frame: 32
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-600
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 89.8
+ Top 5 Accuracy: 98.5
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics600/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb_20221219-f984f5d2.pth
+
+ - Name: uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-B/16
+ Pretrained: Kinetics-710
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-700
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 76.3
+ Top 5 Accuracy: 92.9
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb_20221219-8a7c4ac4.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-700
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 80.8
+ Top 5 Accuracy: 95.2
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb_20221219-bfb9f401.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Frame: 16
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-700
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 81.2
+ Top 5 Accuracy: 95.6
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb_20221219-745209d2.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710
+ Frame: 32
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-700
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 81.4
+ Top 5 Accuracy: 95.7
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb_20221219-eebe7056.pth
+
+ - Name: uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14@336
+ Pretrained: Kinetics-710
+ Frame: 32
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Kinetics-400
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 82.1
+ Top 5 Accuracy: 96.0
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics700/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb_20221219-bfb9f401.pth
+
+ - Name: uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-B/16
+ Pretrained: CLIP-400M
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics710/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb_20221219-77d34f81.pth
+
+ - Name: uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: CLIP-400M
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics710/uniformerv2-large-p14-res224_clip-pre_u8_kinetics710-rgb_20221219-bfaae587.pth
+
+ - Name: uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14@336
+ Pretrained: Kinetics-710
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/kinetics710/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb_20221219-55878cdc.pth
+
+ - Name: uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-B/16
+ Pretrained: Kinetics-710 + Kinetics-400
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Moments in Time V1
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 42.7
+ Top 5 Accuracy: 71.6
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/mitv1/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb_20221219-fddbc786.pth
+
+ - Name: uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14
+ Pretrained: Kinetics-710 + Kinetics-400
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Moments in Time V1
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 47.0
+ Top 5 Accuracy: 76.1
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/mitv1/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb_20221219-882c0598.pth
+
+ - Name: uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb
+ Config: configs/recognition/uniformerv2/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
+ In Collection: UniFormer
+ Metadata:
+ Architecture: UniFormerV2-L/14@336
+ Pretrained: Kinetics-710 + Kinetics-400
+ Frame: 8
+ Sampling method: Uniform
+ Modality: RGB
+ Converted From:
+ Weights: https://github.com/OpenGVLab/UniFormerV2/blob/main/MODEL_ZOO.md
+ Code: https://github.com/OpenGVLab/UniFormerV2
+ Results:
+ - Dataset: Moments in Time V1
+ Task: Action Recognition
+ Metrics:
+ Top 1 Accuracy: 47.7
+ Top 5 Accuracy: 76.8
+ Weights: https://download.openmmlab.com/mmaction/v1.0/recognition/uniformerv2/mitv1/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb_20221219-9020986e.pth
diff --git a/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
new file mode 100644
index 0000000000..a4cae65831
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=16,
+ width=768,
+ layers=12,
+ heads=12,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[8, 9, 10, 11],
+ n_layers=4,
+ n_dim=768,
+ n_head=12,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=339,
+ in_channels=768,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/mit_v1'
+ann_file_test = 'data/mit_v1/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=' '))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py
new file mode 100644
index 0000000000..a3eddb0d04
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=16,
+ width=768,
+ layers=12,
+ heads=12,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[8, 9, 10, 11],
+ n_layers=4,
+ n_dim=768,
+ n_head=12,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=400,
+ in_channels=768,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py
new file mode 100644
index 0000000000..4c91589dbb
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=16,
+ width=768,
+ layers=12,
+ heads=12,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[8, 9, 10, 11],
+ n_layers=4,
+ n_dim=768,
+ n_head=12,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=600,
+ in_channels=768,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k600'
+ann_file_test = 'data/k600/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
new file mode 100644
index 0000000000..92494df5d7
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=16,
+ width=768,
+ layers=12,
+ heads=12,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[8, 9, 10, 11],
+ n_layers=4,
+ n_dim=768,
+ n_head=12,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=700,
+ in_channels=768,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k700'
+ann_file_test = 'data/k700/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb.py b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb.py
new file mode 100644
index 0000000000..7d055c4fb4
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-base-p16-res224_clip-pre_u8_kinetics710-rgb.py
@@ -0,0 +1,37 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=16,
+ width=768,
+ layers=12,
+ heads=12,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[8, 9, 10, 11],
+ n_layers=4,
+ n_dim=768,
+ n_head=12,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=710,
+ in_channels=768,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb.py
new file mode 100644
index 0000000000..5f21a078f8
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics400-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 16
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=400,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb.py
new file mode 100644
index 0000000000..284c313e3d
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics600-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 16
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=600,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k600'
+ann_file_test = 'data/k600/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb.py
new file mode 100644
index 0000000000..f137564572
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u16_kinetics700-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 16
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=700,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k700'
+ann_file_test = 'data/k700/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb.py
new file mode 100644
index 0000000000..94b92cf99e
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics400-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=400,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb.py
new file mode 100644
index 0000000000..7a7ba254df
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics600-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=600,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k600'
+ann_file_test = 'data/k600/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb.py
new file mode 100644
index 0000000000..abf8ff5f06
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u32_kinetics700-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=700,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k700'
+ann_file_test = 'data/k700/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py
new file mode 100644
index 0000000000..751a1cc7a8
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics400-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=400,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py
new file mode 100644
index 0000000000..ea6eea9a9a
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics600-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=600,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k600'
+ann_file_test = 'data/k600/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
new file mode 100644
index 0000000000..b68593afa3
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-kinetics710-pre_u8_kinetics700-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=700,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k700'
+ann_file_test = 'data/k700/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-pre_u8_kinetics710-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-pre_u8_kinetics710-rgb.py
new file mode 100644
index 0000000000..46a60758d8
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res224_clip-pre_u8_kinetics710-rgb.py
@@ -0,0 +1,37 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=710,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb.py
new file mode 100644
index 0000000000..5385c2aa07
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics400-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=336,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=400,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k400'
+ann_file_test = 'data/k400/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=2,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 336)),
+ dict(type='ThreeCrop', crop_size=336),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=4,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb.py
new file mode 100644
index 0000000000..3e495771bc
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics600-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=336,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=600,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k600'
+ann_file_test = 'data/k600/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=2,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 336)),
+ dict(type='ThreeCrop', crop_size=336),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=4,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb.py
new file mode 100644
index 0000000000..9a09934ca0
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-kinetics710-pre_u32_kinetics700-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=336,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=700,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/k700'
+ann_file_test = 'data/k700/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=2,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 336)),
+ dict(type='ThreeCrop', crop_size=336),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=4,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=','))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb.py
new file mode 100644
index 0000000000..e47b8a7148
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p14-res336_clip-pre_u8_kinetics710-rgb.py
@@ -0,0 +1,37 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 32
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=336,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=710,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
new file mode 100644
index 0000000000..19af3d1eac
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p16-res224_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=224,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=339,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/mit_v1'
+ann_file_test = 'data/mit_v1/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 224)),
+ dict(type='ThreeCrop', crop_size=224),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=' '))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/configs/recognition/uniformerv2/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py b/configs/recognition/uniformerv2/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
new file mode 100644
index 0000000000..7842bf1164
--- /dev/null
+++ b/configs/recognition/uniformerv2/uniformerv2-large-p16-res336_clip-kinetics710-kinetics-k400-pre_u8_mitv1-rgb.py
@@ -0,0 +1,70 @@
+_base_ = ['../../configs/_base_/default_runtime.py']
+
+# model settings
+num_frames = 8
+model = dict(
+ type='Recognizer3D',
+ backbone=dict(
+ type='UniFormerV2',
+ input_resolution=336,
+ patch_size=14,
+ width=1024,
+ layers=24,
+ heads=16,
+ t_size=num_frames,
+ dw_reduction=1.5,
+ backbone_drop_path_rate=0.,
+ temporal_downsample=False,
+ no_lmhra=True,
+ double_lmhra=True,
+ return_list=[20, 21, 22, 23],
+ n_layers=4,
+ n_dim=1024,
+ n_head=16,
+ mlp_factor=4.,
+ drop_path_rate=0.,
+ mlp_dropout=[0.5, 0.5, 0.5, 0.5]),
+ cls_head=dict(
+ type='TimeSformerHead',
+ dropout_ratio=0.5,
+ num_classes=339,
+ in_channels=1024,
+ average_clips='prob'),
+ data_preprocessor=dict(
+ type='ActionDataPreprocessor',
+ mean=[114.75, 114.75, 114.75],
+ std=[57.375, 57.375, 57.375],
+ format_shape='NCTHW'))
+
+# dataset settings
+dataset_type = 'VideoDataset'
+data_root_val = 'data/mit_v1'
+ann_file_test = 'data/mit_v1/val.csv'
+
+test_pipeline = [
+ dict(type='DecordInit'),
+ dict(
+ type='UniformSample', clip_len=num_frames, num_clips=4,
+ test_mode=True),
+ dict(type='DecordDecode'),
+ dict(type='Resize', scale=(-1, 336)),
+ dict(type='ThreeCrop', crop_size=336),
+ dict(type='FormatShape', input_format='NCTHW'),
+ dict(type='PackActionInputs')
+]
+
+test_dataloader = dict(
+ batch_size=8,
+ num_workers=8,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file=ann_file_test,
+ data_prefix=dict(video=data_root_val),
+ pipeline=test_pipeline,
+ test_mode=True,
+ delimiter=' '))
+
+test_evaluator = dict(type='AccMetric')
+test_cfg = dict(type='TestLoop')
diff --git a/demo/README.md b/demo/README.md
index 88e4c96bf8..f3f4ba1db9 100644
--- a/demo/README.md
+++ b/demo/README.md
@@ -7,6 +7,8 @@
- [Video GradCAM Demo](#video-gradcam-demo): A demo script to visualize GradCAM results using a single video.
- [Webcam demo](#webcam-demo): A demo script to implement real-time action recognition from a web camera.
- [Skeleton-based Action Recognition Demo](#skeleton-based-action-recognition-demo): A demo script to predict the skeleton-based action recognition result using a single video.
+- [SpatioTemporal Action Detection Video Demo](#spatiotemporal-action-detection-video-demo): A demo script to predict the spatiotemporal action detection result using a single video.
+- [Inferencer Demo](#inferencer): A demo script to implement fast predict for video analysis tasks based on unified inferencer interface.
## Modify configs through script arguments
@@ -52,13 +54,13 @@ Optional arguments:
Examples:
Assume that you are located at `$MMACTION2` and have already downloaded the checkpoints to the directory `checkpoints/`,
-or use checkpoint url from to directly load corresponding checkpoint, which will be automatically saved in `$HOME/.cache/torch/checkpoints`.
+or use checkpoint url from `configs/` to directly load corresponding checkpoint, which will be automatically saved in `$HOME/.cache/torch/checkpoints`.
1. Recognize a video file as input by using a TSN model on cuda by default.
```shell
# The demo.mp4 and label_map_k400.txt are both from Kinetics-400
- python demo/demo.py configs/recognition/tsn/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb.py \
+ python demo/demo.py demo/demo_configs/tsn_r50_1x1x8_video_infer.py \
checkpoints/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb_20220818-2692d16c.pth \
demo/demo.mp4 tools/data/kinetics/label_map_k400.txt
```
@@ -67,7 +69,7 @@ or use checkpoint url from to directly load corresponding checkpoint, which will
```shell
# The demo.mp4 and label_map_k400.txt are both from Kinetics-400
- python demo/demo.py configs/recognition/tsn/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb.py \
+ python demo/demo.py demo/demo_configs/tsn_r50_1x1x8_video_infer.py \
https://download.openmmlab.com/mmaction/v1.0/recognition/tsn/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb_20220818-2692d16c.pth \
demo/demo.mp4 tools/data/kinetics/label_map_k400.txt
```
@@ -76,7 +78,7 @@ or use checkpoint url from to directly load corresponding checkpoint, which will
```shell
# The demo.mp4 and label_map_k400.txt are both from Kinetics-400
- python demo/demo.py configs/recognition/tsn/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb.py \
+ python demo/demo.py demo/demo_configs/tsn_r50_1x1x8_video_infer.py \
checkpoints/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb_20220818-2692d16c.pth \
demo/demo.mp4 tools/data/kinetics/label_map_k400.txt --out-filename demo/demo_out.mp4
```
@@ -86,7 +88,7 @@ or use checkpoint url from to directly load corresponding checkpoint, which will
MMAction2 provides a demo script to visualize GradCAM results using a single video.
```shell
-python demo/demo_gradcam.py ${CONFIG_FILE} ${CHECKPOINT_FILE} ${VIDEO_FILE} [--use-frames] \
+python tools/visualizations/vis_cam.py ${CONFIG_FILE} ${CHECKPOINT_FILE} ${VIDEO_FILE} [--use-frames] \
[--device ${DEVICE_TYPE}] [--target-layer-name ${TARGET_LAYER_NAME}] [--fps {FPS}] \
[--target-resolution ${TARGET_RESOLUTION}] [--resize-algorithm {RESIZE_ALGORITHM}] [--out-filename {OUT_FILE}]
```
@@ -107,7 +109,7 @@ or use checkpoint url from `configs/` to directly load corresponding checkpoint,
1. Get GradCAM results of a I3D model, using a video file as input and then generate an gif file with 10 fps.
```shell
- python demo/demo_gradcam.py demo/demo_configs/i3d_r50_32x2x1_video_infer.py \
+ python tools/visualizations/vis_cam.py demo/demo_configs/i3d_r50_32x2x1_video_infer.py \
checkpoints/i3d_imagenet-pretrained-r50_8xb8-32x2x1-100e_kinetics400-rgb_20220812-e213c223.pth demo/demo.mp4 \
--target-layer-name backbone/layer4/1/relu --fps 10 \
--out-filename demo/demo_gradcam.gif
@@ -116,7 +118,7 @@ or use checkpoint url from `configs/` to directly load corresponding checkpoint,
2. Get GradCAM results of a TSN model, using a video file as input and then generate an gif file, loading checkpoint from url.
```shell
- python demo/demo_gradcam.py demo/demo_configs/tsn_r50_1x1x8_video_infer.py \
+ python tools/visualizations/vis_cam.py demo/demo_configs/tsn_r50_1x1x8_video_infer.py \
https://download.openmmlab.com/mmaction/v1.0/recognition/tsn/tsn_imagenet-pretrained-r50_8xb32-dense-1x1x5-100e_kinetics400-rgb/tsn_imagenet-pretrained-r50_8xb32-dense-1x1x5-100e_kinetics400-rgb_20220906-dcbc6e01.pth \
demo/demo.mp4 --target-layer-name backbone/layer4/1/relu --out-filename demo/demo_gradcam_tsn.gif
```
@@ -183,7 +185,7 @@ Users can change:
## Skeleton-based Action Recognition Demo
-MMAction2 provides an demo script to predict the skeleton-based action recognition result using a single video.
+MMAction2 provides a demo script to predict the skeleton-based action recognition result using a single video.
```shell
python demo/demo_skeleton.py ${VIDEO_FILE} ${OUT_FILENAME} \
@@ -247,3 +249,122 @@ python demo/demo_skeleton.py demo/demo_skeleton.mp4 demo/demo_skeleton_out.mp4 \
--pose-checkpoint https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_256x192-c78dce93_20200708.pth \
--label-map tools/data/skeleton/label_map_ntu60.txt
```
+
+## SpatioTemporal Action Detection Video Demo
+
+MMAction2 provides a demo script to predict the SpatioTemporal Action Detection result using a single video.
+
+```shell
+python demo/demo_spatiotemporal_det.py --video ${VIDEO_FILE} \
+ [--out-filename ${OUTPUT_FILENAME}] \
+ [--config ${SPATIOTEMPORAL_ACTION_DETECTION_CONFIG_FILE}] \
+ [--checkpoint ${SPATIOTEMPORAL_ACTION_DETECTION_CHECKPOINT}] \
+ [--det-config ${HUMAN_DETECTION_CONFIG_FILE}] \
+ [--det-checkpoint ${HUMAN_DETECTION_CHECKPOINT}] \
+ [--det-score-thr ${HUMAN_DETECTION_SCORE_THRESHOLD}] \
+ [--det-cat-id ${HUMAN_DETECTION_CATEGORY_ID}] \
+ [--action-score-thr ${ACTION_DETECTION_SCORE_THRESHOLD}] \
+ [--label-map ${LABEL_MAP}] \
+ [--device ${DEVICE}] \
+ [--short-side] ${SHORT_SIDE} \
+ [--predict-stepsize ${PREDICT_STEPSIZE}] \
+ [--output-stepsize ${OUTPUT_STEPSIZE}] \
+ [--output-fps ${OUTPUT_FPS}]
+```
+
+Optional arguments:
+
+- `OUTPUT_FILENAME`: Path to the output file which is a video format. Defaults to `demo/stdet_demo.mp4`.
+- `SPATIOTEMPORAL_ACTION_DETECTION_CONFIG_FILE`: The spatiotemporal action detection config file path.
+- `SPATIOTEMPORAL_ACTION_DETECTION_CHECKPOINT`: The spatiotemporal action detection checkpoint URL.
+- `HUMAN_DETECTION_CONFIG_FILE`: The human detection config file path.
+- `HUMAN_DETECTION_CHECKPOINT`: The human detection checkpoint URL.
+- `HUMAN_DETECTION_SCORE_THRESHOLD`: The score threshold for human detection. Defaults to 0.9.
+- `HUMAN_DETECTION_CATEGORY_ID`: The category id for human detection. Defaults to 0.
+- `ACTION_DETECTION_SCORE_THRESHOLD`: The score threshold for action detection. Defaults to 0.5.
+- `LABEL_MAP`: The label map used. Defaults to `tools/data/ava/label_map.txt`.
+- `DEVICE`: Type of device to run the demo. Allowed values are cuda device like `cuda:0` or `cpu`. Defaults to `cuda:0`.
+- `SHORT_SIDE`: The short side used for frame extraction. Defaults to 256.
+- `PREDICT_STEPSIZE`: Make a prediction per N frames. Defaults to 8.
+- `OUTPUT_STEPSIZE`: Output 1 frame per N frames in the input video. Note that `PREDICT_STEPSIZE % OUTPUT_STEPSIZE == 0`. Defaults to 4.
+- `OUTPUT_FPS`: The FPS of demo video output. Defaults to 6.
+
+Examples:
+
+Assume that you are located at `$MMACTION2` .
+
+1. Use the Faster RCNN as the human detector, SlowOnly-8x8-R101 as the action detector. Making predictions per 8 frames, and output 1 frame per 4 frames to the output video. The FPS of the output video is 4.
+
+```shell
+python demo/demo_spatiotemporal_det.py demo/demo.mp4 demo/demo_spatiotemporal_det.mp4 \
+ --config configs/detection/ava/slowonly_kinetics400-pretrained-r101_8xb16-8x8x1-20e_ava21-rgb.py \
+ --checkpoint https://download.openmmlab.com/mmaction/detection/ava/slowonly_omnisource_pretrained_r101_8x8x1_20e_ava_rgb/slowonly_omnisource_pretrained_r101_8x8x1_20e_ava_rgb_20201217-16378594.pth \
+ --det-config demo/demo_configs/faster-rcnn_r50_fpn_2x_coco_infer.py \
+ --det-checkpoint http://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_2x_coco/faster_rcnn_r50_fpn_2x_coco_bbox_mAP-0.384_20200504_210434-a5d8aa15.pth \
+ --det-score-thr 0.9 \
+ --action-score-thr 0.5 \
+ --label-map tools/data/ava/label_map.txt \
+ --predict-stepsize 8 \
+ --output-stepsize 4 \
+ --output-fps 6
+```
+
+## Inferencer
+
+MMAction2 provides a demo script to implement fast prediction for video analysis tasks based on unified inferencer interface, currently only supports action recognition task.
+
+```shell
+python demo/demo.py ${INPUTS} \
+ [--vid-out-dir ${VID_OUT_DIR}] \
+ [--rec ${RECOG_TASK}] \
+ [--rec-weights ${RECOG_WEIGHTS}] \
+ [--label-file ${LABEL_FILE}] \
+ [--device ${DEVICE_TYPE}] \
+ [--batch-size ${BATCH_SIZE}] \
+ [--print-result ${PRINT_RESULT}] \
+ [--pred-out-file ${PRED_OUT_FILE} ]
+```
+
+Optional arguments:
+
+- `--show`: If specified, the demo will display the video in a popup window.
+- `--print-result`: If specified, the demo will print the inference results'
+- `VID_OUT_DIR`: Output directory of saved videos. Defaults to None, means not to save videos.
+- `RECOG_TASK`: Type of Action Recognition algorithm. It could be the path to the config file, the model name or alias defined in metafile.
+- `RECOG_WEIGHTS`: Path to the custom checkpoint file of the selected recog model. If it is not specified and "rec" is a model name of metafile, the weights will be loaded from metafile.
+- `LABEL_FILE`: Label file for dataset the algorithm pretrained on. Defaults to None, means don't show label in result.
+- `DEVICE_TYPE`: Type of device to run the demo. Allowed values are cuda device like `cuda:0` or `cpu`. Defaults to `cuda:0`.
+- `BATCH_SIZE`: The batch size used in inference. Defaults to 1.
+- `PRED_OUT_FILE`: File path to save the inference results. Defaults to None, means not to save prediction results.
+
+Examples:
+
+Assume that you are located at `$MMACTION2`.
+
+1. Recognize a video file as input by using a TSN model, loading checkpoint from metafile.
+
+ ```shell
+ # The demo.mp4 and label_map_k400.txt are both from Kinetics-400
+ python demo/demo_inferencer.py demo/demo.mp4 \
+ --rec configs/recognition/tsn/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb.py \
+ --label-file tools/data/kinetics/label_map_k400.txt
+ ```
+
+2. Recognize a video file as input by using a TSN model, using model alias in metafile.
+
+ ```shell
+ # The demo.mp4 and label_map_k400.txt are both from Kinetics-400
+ python demo/demo_inferencer.py demo/demo.mp4 \
+ --rec tsn \
+ --label-file tools/data/kinetics/label_map_k400.txt
+ ```
+
+3. Recognize a video file as input by using a TSN model, and then save visulization video.
+
+ ```shell
+ # The demo.mp4 and label_map_k400.txt are both from Kinetics-400
+ python demo/demo_inferencer.py demo/demo.mp4 \
+ --vid-out-dir demo_out \
+ --rec tsn \
+ --label-file tools/data/kinetics/label_map_k400.txt
+ ```
diff --git a/demo/demo.ipynb b/demo/demo.ipynb
index 2f1c764426..ebcf2ff538 100644
--- a/demo/demo.ipynb
+++ b/demo/demo.ipynb
@@ -2,7 +2,7 @@
"cells": [
{
"cell_type": "code",
- "execution_count": 1,
+ "execution_count": 10,
"metadata": {
"collapsed": true,
"pycharm": {
@@ -11,66 +11,58 @@
},
"outputs": [],
"source": [
- "from mmaction.apis import init_recognizer, inference_recognizer\n",
- "from mmaction.utils import register_all_modules"
+ "from operator import itemgetter\n",
+ "from mmaction.apis import init_recognizer, inference_recognizer"
]
},
{
"cell_type": "code",
- "execution_count": 2,
- "outputs": [],
- "source": [
- "register_all_modules() # register all modules and set mmaction2 as the default scope."
- ],
+ "execution_count": 4,
"metadata": {
"collapsed": false,
"pycharm": {
"name": "#%%\n"
}
- }
- },
- {
- "cell_type": "code",
- "execution_count": 3,
+ },
"outputs": [],
"source": [
- "config_file = '../configs/recognition/tsn/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb.py'\n",
+ "config_file = '../demo/demo_configs/tsn_r50_1x1x8_video_infer.py'\n",
"# download the checkpoint from model zoo and put it in `checkpoints/`\n",
"checkpoint_file = '../checkpoints/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb_20220818-2692d16c.pth'"
- ],
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 5,
"metadata": {
"collapsed": false,
"pycharm": {
"name": "#%%\n"
}
- }
- },
- {
- "cell_type": "code",
- "execution_count": 4,
+ },
"outputs": [
{
"name": "stdout",
"output_type": "stream",
"text": [
- "local loads checkpoint from path: ../checkpoints/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb_20220818-2692d16c.pth\n"
+ "Loads checkpoint by local backend from path: ../checkpoints/tsn_r50_8xb32-1x1x8-100e_kinetics400-rgb_20220818-2692d16c.pth\n"
]
}
],
"source": [
"# build the model from a config file and a checkpoint file\n",
"model = init_recognizer(config_file, checkpoint_file, device='cpu')"
- ],
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 11,
"metadata": {
"collapsed": false,
"pycharm": {
"name": "#%%\n"
}
- }
- },
- {
- "cell_type": "code",
- "execution_count": 5,
+ },
"outputs": [],
"source": [
"# test a single video and show the result:\n",
@@ -78,30 +70,35 @@
"label = '../tools/data/kinetics/label_map_k400.txt'\n",
"results = inference_recognizer(model, video)\n",
"\n",
+ "pred_scores = results.pred_scores.item.tolist()\n",
+ "score_tuples = tuple(zip(range(len(pred_scores)), pred_scores))\n",
+ "score_sorted = sorted(score_tuples, key=itemgetter(1), reverse=True)\n",
+ "top5_label = score_sorted[:5]\n",
+ "\n",
"labels = open(label).readlines()\n",
"labels = [x.strip() for x in labels]\n",
- "results = [(labels[k[0]], k[1]) for k in results]"
- ],
+ "results = [(labels[k[0]], k[1]) for k in top5_label]"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 12,
"metadata": {
"collapsed": false,
"pycharm": {
"name": "#%%\n"
}
- }
- },
- {
- "cell_type": "code",
- "execution_count": 6,
+ },
"outputs": [
{
"name": "stdout",
"output_type": "stream",
"text": [
- "arm wrestling: 50.61515426635742\n",
- "rock scissors paper: 16.606340408325195\n",
- "massaging feet: 15.414356231689453\n",
- "stretching leg: 13.792497634887695\n",
- "bench pressing: 13.432787895202637\n"
+ "arm wrestling: 1.0\n",
+ "rock scissors paper: 1.698846019067312e-15\n",
+ "massaging feet: 5.157996544393221e-16\n",
+ "stretching leg: 1.018867278715779e-16\n",
+ "bench pressing: 7.110452486439706e-17\n"
]
}
],
@@ -109,32 +106,31 @@
"# show the results\n",
"for result in results:\n",
" print(f'{result[0]}: ', result[1])"
- ],
- "metadata": {
- "collapsed": false,
- "pycharm": {
- "name": "#%%\n"
- }
- }
+ ]
}
],
"metadata": {
"kernelspec": {
- "display_name": "Python 3",
+ "display_name": "mmact_dev",
"language": "python",
"name": "python3"
},
"language_info": {
"codemirror_mode": {
"name": "ipython",
- "version": 2
+ "version": 3
},
"file_extension": ".py",
"mimetype": "text/x-python",
"name": "python",
"nbconvert_exporter": "python",
- "pygments_lexer": "ipython2",
- "version": "2.7.6"
+ "pygments_lexer": "ipython3",
+ "version": "3.7.13 (default, Mar 29 2022, 02:18:16) \n[GCC 7.5.0]"
+ },
+ "vscode": {
+ "interpreter": {
+ "hash": "189c342a4747645665e89db23000ac4d4edb7a87c4cd0b2f881610f468fb778d"
+ }
}
},
"nbformat": 4,
diff --git a/demo/demo.py b/demo/demo.py
index 5cebcd3abe..6c9b5db5a5 100644
--- a/demo/demo.py
+++ b/demo/demo.py
@@ -4,11 +4,9 @@
from operator import itemgetter
from typing import Optional, Tuple
-import cv2
from mmengine import Config, DictAction
from mmaction.apis import inference_recognizer, init_recognizer
-from mmaction.utils import register_all_modules
from mmaction.visualization import ActionVisualizer
@@ -88,34 +86,9 @@ def get_output(
if video_path.startswith(('http://', 'https://')):
raise NotImplementedError
- try:
- import decord
- except ImportError:
- raise ImportError('Please install decord to enable output file.')
-
- # Channel Order is `BGR`
- video = decord.VideoReader(video_path)
- frames = [x.asnumpy()[..., ::-1] for x in video]
- if target_resolution:
- w, h = target_resolution
- frame_h, frame_w, _ = frames[0].shape
- if w == -1:
- w = int(h / frame_h * frame_w)
- if h == -1:
- h = int(w / frame_w * frame_h)
- frames = [cv2.resize(f, (w, h)) for f in frames]
-
# init visualizer
out_type = 'gif' if osp.splitext(out_filename)[1] == '.gif' else 'video'
- vis_backends_cfg = [
- dict(
- type='LocalVisBackend',
- out_type=out_type,
- save_dir='demo',
- fps=fps)
- ]
- visualizer = ActionVisualizer(
- vis_backends=vis_backends_cfg, save_dir='place_holder')
+ visualizer = ActionVisualizer()
visualizer.dataset_meta = dict(classes=labels)
text_cfg = {'colors': font_color}
@@ -124,19 +97,20 @@ def get_output(
visualizer.add_datasample(
out_filename,
- frames,
+ video_path,
data_sample,
draw_pred=True,
draw_gt=False,
- text_cfg=text_cfg)
+ text_cfg=text_cfg,
+ fps=fps,
+ out_type=out_type,
+ out_path=osp.join('demo', out_filename),
+ target_resolution=target_resolution)
def main():
args = parse_args()
- # Register all modules in mmaction2 into the registries
- register_all_modules()
-
cfg = Config.fromfile(args.config)
if args.cfg_options is not None:
cfg.merge_from_dict(args.cfg_options)
diff --git a/demo/demo_inferencer.py b/demo/demo_inferencer.py
new file mode 100644
index 0000000000..f7a7f365e9
--- /dev/null
+++ b/demo/demo_inferencer.py
@@ -0,0 +1,70 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+from argparse import ArgumentParser
+
+from mmaction.apis.inferencers import MMAction2Inferencer
+
+
+def parse_args():
+ parser = ArgumentParser()
+ parser.add_argument(
+ 'inputs', type=str, help='Input video file or rawframes folder path.')
+ parser.add_argument(
+ '--vid-out-dir',
+ type=str,
+ default='',
+ help='Output directory of videos.')
+ parser.add_argument(
+ '--rec',
+ type=str,
+ default=None,
+ help='Pretrained action recognition algorithm. It\'s the path to the '
+ 'config file or the model name defined in metafile.')
+ parser.add_argument(
+ '--rec-weights',
+ type=str,
+ default=None,
+ help='Path to the custom checkpoint file of the selected recog model. '
+ 'If it is not specified and "rec" is a model name of metafile, the '
+ 'weights will be loaded from metafile.')
+ parser.add_argument(
+ '--label-file', type=str, default=None, help='label file for dataset.')
+ parser.add_argument(
+ '--device',
+ type=str,
+ default=None,
+ help='Device used for inference. '
+ 'If not specified, the available device will be automatically used.')
+ parser.add_argument(
+ '--batch-size', type=int, default=1, help='Inference batch size.')
+ parser.add_argument(
+ '--show',
+ action='store_true',
+ help='Display the video in a popup window.')
+ parser.add_argument(
+ '--print-result',
+ action='store_true',
+ help='Whether to print the results.')
+ parser.add_argument(
+ '--pred-out-file',
+ type=str,
+ default='',
+ help='File to save the inference results.')
+
+ call_args = vars(parser.parse_args())
+
+ init_kws = ['rec', 'rec_weights', 'device', 'label_file']
+ init_args = {}
+ for init_kw in init_kws:
+ init_args[init_kw] = call_args.pop(init_kw)
+
+ return init_args, call_args
+
+
+def main():
+ init_args, call_args = parse_args()
+ mmaction2 = MMAction2Inferencer(**init_args)
+ mmaction2(**call_args)
+
+
+if __name__ == '__main__':
+ main()
diff --git a/demo/demo_skeleton.py b/demo/demo_skeleton.py
index 98ce13f1bd..57c84c90a3 100644
--- a/demo/demo_skeleton.py
+++ b/demo/demo_skeleton.py
@@ -14,7 +14,7 @@
from mmaction.apis import (detection_inference, inference_recognizer,
init_recognizer, pose_inference)
from mmaction.registry import VISUALIZERS
-from mmaction.utils import frame_extract, register_all_modules
+from mmaction.utils import frame_extract
try:
import moviepy.editor as mpy
@@ -168,12 +168,8 @@ def main():
fake_anno['keypoint'] = keypoint.transpose((1, 0, 2, 3))
fake_anno['keypoint_score'] = keypoint_score.transpose((1, 0, 2))
- register_all_modules()
config = mmengine.Config.fromfile(args.config)
config.merge_from_dict(args.cfg_options)
- if 'data_preprocessor' in config.model:
- config.model.data_preprocessor['mean'] = (w // 2, h // 2, .5)
- config.model.data_preprocessor['std'] = (w, h, 1.)
model = init_recognizer(config, args.checkpoint, args.device)
result = inference_recognizer(model, fake_anno)
diff --git a/demo/demo_spatiotemporal_det.py b/demo/demo_spatiotemporal_det.py
index a8e49c1020..009a9475a6 100644
--- a/demo/demo_spatiotemporal_det.py
+++ b/demo/demo_spatiotemporal_det.py
@@ -17,7 +17,6 @@
from mmaction.apis import detection_inference
from mmaction.registry import MODELS
from mmaction.structures import ActionDataSample
-from mmaction.utils import register_all_modules
try:
import moviepy.editor as mpy
@@ -179,8 +178,7 @@ def pack_result(human_detection, result, img_h, img_w):
def parse_args():
parser = argparse.ArgumentParser(description='MMAction2 demo')
parser.add_argument('video', help='video file/url')
- parser.add_argument(
- 'out_filename', help='output filename', default='demo/stdet_demo.mp4')
+ parser.add_argument('out_filename', help='output filename')
parser.add_argument(
'--config',
default=('configs/detection/ava/slowonly_kinetics400-pretrained-'
@@ -195,7 +193,7 @@ def parse_args():
help='spatialtemporal detection model checkpoint file/url')
parser.add_argument(
'--det-config',
- default='demo/skeleton_demo_cfg/faster-rcnn_r50_fpn_2x_coco_infer.py',
+ default='demo/demo_configs/faster-rcnn_r50_fpn_2x_coco_infer.py',
help='human detection config file path (from mmdet)')
parser.add_argument(
'--det-checkpoint',
@@ -260,7 +258,6 @@ def parse_args():
def main():
args = parse_args()
- register_all_modules()
frame_paths, original_frames = frame_extraction(args.video)
num_frame = len(frame_paths)
diff --git a/demo/mmaction2_tutorial.ipynb b/demo/mmaction2_tutorial.ipynb
index 98884de80b..f0f5fb9d03 100644
--- a/demo/mmaction2_tutorial.ipynb
+++ b/demo/mmaction2_tutorial.ipynb
@@ -1,15 +1,15 @@
{
"cells": [
{
- "cell_type": "markdown",
- "metadata": {
- "colab_type": "text",
- "id": "view-in-github"
- },
- "source": [
- "
+