Reset Cruizcore Sensor #29
Comments
|
I receive and answer from Minfinity but using a Textual programming language:
I need to find a solution using EV3G |
|
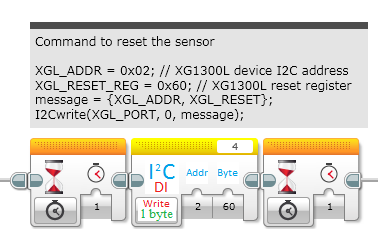
I have written to Minfinity to know if with the Dexter I2C block is possible to send to the address 0x02 the register 0x60 to the sensor, in order to reset the sensor. Besides, I have just sent a request to Dexter about the usage of the I2C Block in the forum.
I think that the idea is right, re-reading this article from dexter: "For a 1 byte write, change the function to Write 1 Byte and enter the byte that you want to send to the Arduino. When you start the program, the EV3 will send the data to the Arduino and the Arduino will display the data on the Serial Terminal." Another interesting article about the usage of I2C Block from Dexter is: |

|
I am using this 7 bits table: |
|
An interesting doc from EV3Dev: |
|
"" |
|
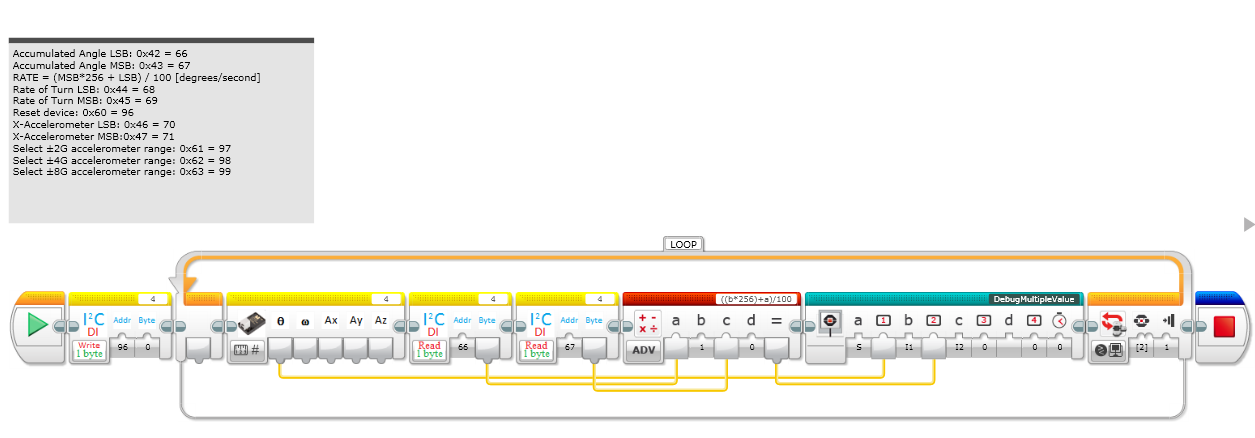
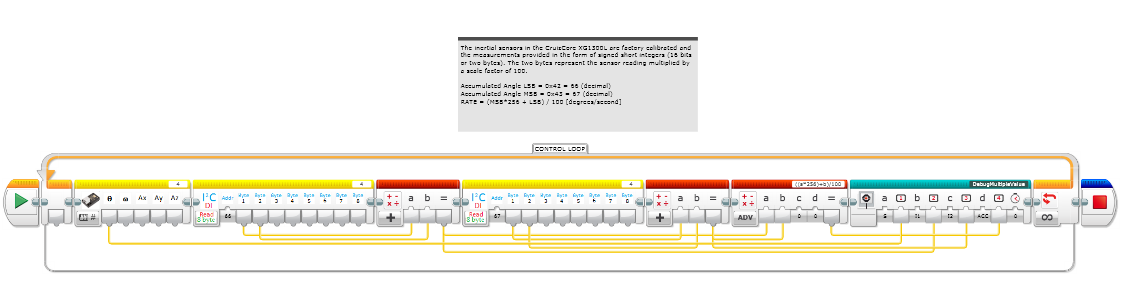
It is possible to read the values from I2C Registers:
|
|
Now, it is necessary to discover the calculus for the 5 outputs of the block. |
|
The key point:
The block used only read the first byte.
|
|
New question on Dexter forum: |
|
New answer from Minfinity:
|
|
Pending doubt:
|
I need to find a solution to Reset the sensor using a I2C Block. Exist a solution for Arduino and to reading I2C registers but I am not sure if exist a solution to write.
Arduino I2C Block:
http://www.dexterindustries.com/howto/connecting-ev3-arduino/
https://engmuhannadalkhudari.wordpress.com/2016/02/11/nxtev3-arduino-i2c-ultimate-guide/
EV3 Read I2C Block:
http://www.mindsensors.com/blog/how-to/check-basic-information-of-your-i2c-sensors
LeJOS Driver:
http://www.lejos.org/ev3/docs/lejos/hardware/sensor/CruizcoreGyro.html
https://sourceforge.net/p/lejos/ev3/code/ci/master/tree/ev3classes/src/lejos/hardware/sensor/CruizcoreGyro.java
NXT I2C Blocks:
http://www.teamhassenplug.org/NXT/NXTGAdditions.html
The text was updated successfully, but these errors were encountered: