My rqt_ easy_handeye There is no menu in handeye interface. ask your help #69
Comments
|
Hello @aoligeihahah, the sampler crashed, because the tf frame Since you are calibrating a kinect, I guess that you are using an AR marker tracking library, like ArUco. That library should publish the pose of the marker in tf, as a transform from the camera to the marker. You will have to insert the tf frame of the marker as your |
|
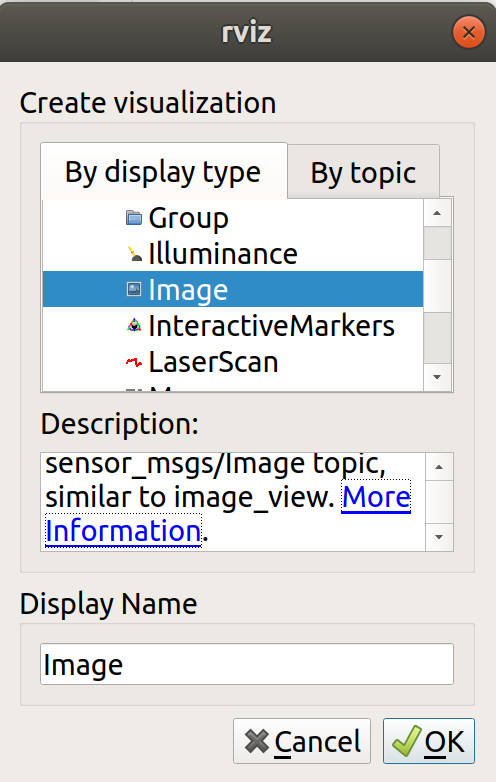
Hello,I want to open the rqt menu bar and select plugins - visualization - image view, as shown in the figure below, |

|
My system is: |
Simply, you can just press “Add” button on your first rviz GUI, then select "image" plugin and choose the topic you want to show. |
|
Thank you. I did as you said. My image didn't receive the image. I'm very strange, if I just run aruco_ ros's single. Launch will get a color image, but run ur10_ kinect2_ calibration.launch After that, I tried rosrun image_ view image_ view image:=/aruco_ Single / result, the image will not be obtained and the window will not respond, as shown in the following figure: |

|
he@he-OptiPlex-5040: /home/he/.local/lib/python2.7/site-packages/pkg_resources/py2_warn.py:21: UserWarning: Setuptools will stop working on Python 2 You are running Setuptools on Python 2, which is no longer
sys.version_info < (3,) and warnings.warn(pre + "" * 60 + msg + "" * 60) You are running Setuptools on Python 2, which is no longer
sys.version_info < (3,) and warnings.warn(pre + "" * 60 + msg + "" * 60) SUMMARYPARAMETERS
NODES ROS_MASTER_URI=http://localhost:11311 process[kinect2-1]: started with pid [16110] process[rviz_he_OptiPlex_5040_16090_576387779056422326-19]: started with pid [16338]
[ INFO] [1607013283.444480521]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner You can start planning now! [ INFO] [1607013283.539441552]: Stereo is NOT SUPPORTED If I open the image, I will report the errors. Am I missing some installation? |
|
hello@marcoesposito1988,How should I get aruco, which should publish tagged poses in TF |
|
There are some errors related to the kinect2 nodelets in your log: If the I would suggest you to check:
If you can't get |
|
I have another question. You have plugins in the rqt document display, but my rqt does not. What is the reason? |


|
hello@marcoesposito1988,This is the marker parameter I detected by aruco. |

|
try to |
@lyh458 already did; you can find it here: https://github.com/IFL-CAMP/easy_handeye/blob/master/docs/example_launch/iiwa_kinect_xtion_calibration.launch |
|
i have the same question : NO MENU BAR ! i can not select plugins - visualization - image view. if you have solved it pls tell me tks |
rqt_imageview you can see it |
Look at my Chinese blog to solve your problem. |
|
hello @ @
|
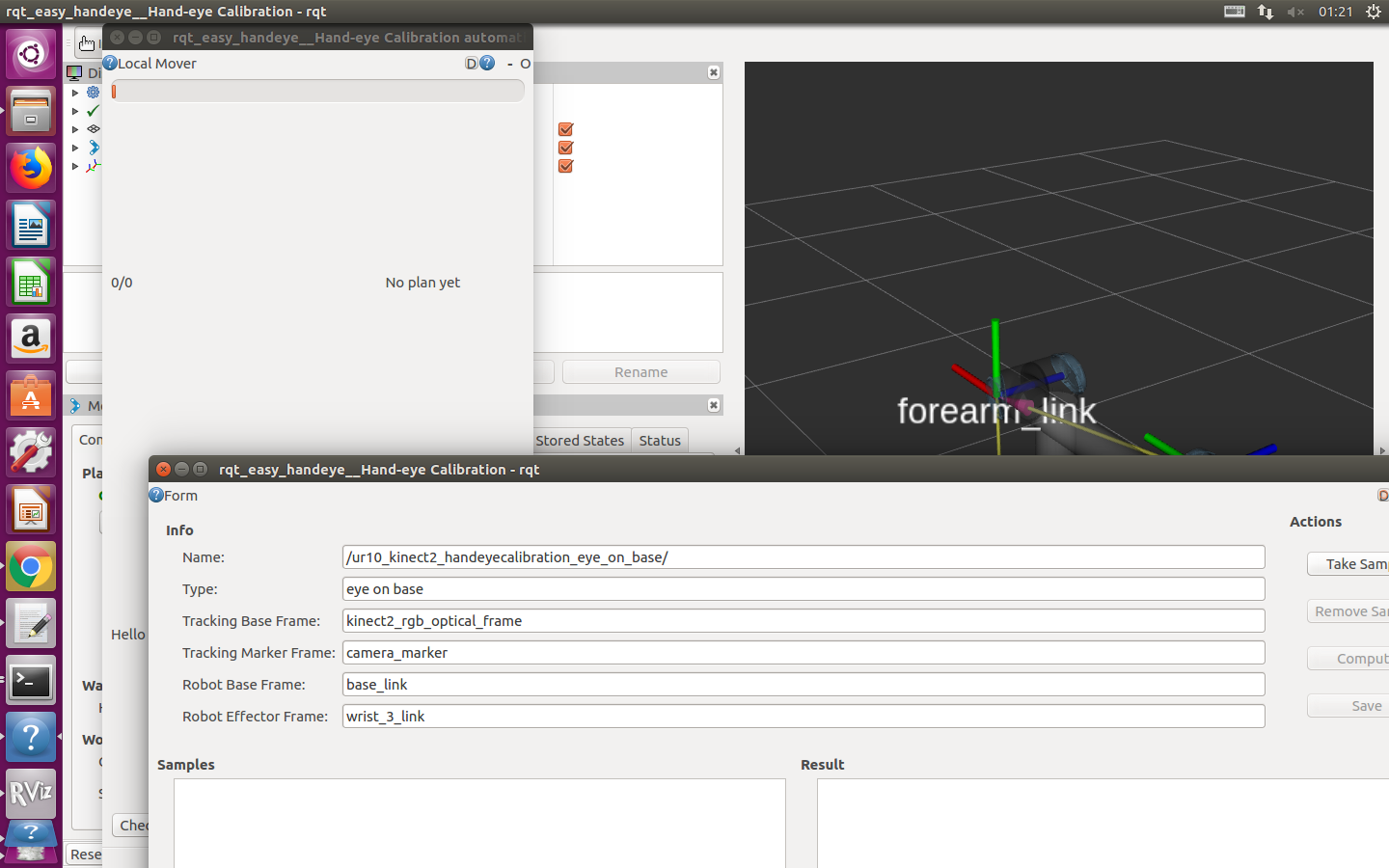
If I click takesample, I will report an error. I don't know the reason and ask for your help
Error processing request: "camera_marker" passed to lookupTransform argument source_frame does not exist.
['Traceback (most recent call last):\n', ' File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 625, in _handle_request\n response = convert_return_to_response(self.handler(request), self.response_class)\n', ' File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_server.py", line 61, in take_sample\n self.sampler.take_sample()\n', ' File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_sampler.py", line 88, in take_sample\n transforms = self._get_transforms()\n', ' File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_sampler.py", line 78, in _get_transforms\n Duration(10))\n', ' File "/opt/ros/kinetic/lib/python2.7/dist-packages/tf2_ros/buffer.py", line 87, in lookup_transform\n return self.lookup_transform_core(target_frame, source_frame, time)\n', 'LookupException: "camera_marker" passed to lookupTransform argument source_frame does not exist. \n']
Traceback (most recent call last):
File "/home/he/catkin_ws/src/easy_handeye/rqt_easy_handeye/src/rqt_easy_handeye/rqt_easy_handeye.py", line 118, in handle_take_sample
sample_list = self.client.take_sample()
File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_client.py", line 69, in take_sample
return self.take_sample_proxy().samples
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 435, in call
return self.call(*args, *kwds)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 515, in call
responses = transport.receive_once()
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py", line 728, in receive_once
p.read_messages(b, msg_queue, sock)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 353, in read_messages
self._read_ok_byte(b, sock)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 336, in _read_ok_byte
raise ServiceException("service [%s] responded with an error: %s"%(self.resolved_name, str))
rospy.service.ServiceException: service [/ur10_kinect2_handeyecalibration_eye_on_base/take_sample] responded with an error: error processing request: "camera_marker" passed to lookupTransform argument source_frame does not exist.
[ur10_kinect2_handeyecalibration_eye_on_base/namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt-17] process has died [pid 17692, exit code 1, cmd /home/he/catkin_ws/src/easy_handeye/rqt_easy_handeye/scripts/rqt_easy_handeye __name:=namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt __log:=/home/he/.ros/log/15dc51b4-33f6-11eb-8f33-484d7ea54583/ur10_kinect2_handeyecalibration_eye_on_base-namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt-17.log].
log file: /home/he/.ros/log/15dc51b4-33f6-11eb-8f33-484d7ea54583/ur10_kinect2_handeyecalibration_eye_on_base-namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt-17.log
The text was updated successfully, but these errors were encountered: